




- @qq_42722197
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本次会议采用在线方式报名参会,并通过在线系统提交论文,在线投稿链接:https://www.yanfajia.com/action/p/VF3ESYJ8。本次会议采用在线方式报名参会,并通过在线系统提交论文:https://www.yanfajia.com/action/p/8NJA62EV。本次会议采用在线方式报名参会,并通过在线系统提交论文:https://www.yanfajia.com/a
SimpleDiffusion的价值,在于打破了“高精度必须依赖大模型”的固有认知,既保证了多模态显著目标检测的效果,又解决了模型轻量化、高效化的问题。SimpleDiffusion是首个不依赖Stable Diffusion的轻量型扩散模型,它的设计思路很简单:在保证检测精度的前提下,把模型做小、把速度提快,同时优化多模态信息的融合效果。简单理解,就是把模型迭代过程中产生的多个中间结果,按重要程
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达实现功能实习公司的项目,复现Cognex VisionPro 3D的大部分内容,涵盖眼在手外、眼在手上,包括相机标定、手眼标定、3D定位计算位移偏差。最后的位移偏差与Cognex的结果在1mm左右。实施路线用python实现原型验证算法,再移植成C++编译为dll,供C#调用。python的库主要用到:cv2、numpyC++的
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达来自|知乎 作者|刘震链接|https://zhuanlan.zhihu.com/p/52827335编辑|人工智能前沿讲习一般炼丹都在服务器上,很少有人在本机跑代码的。之前自己捣鼓怎么用本地的编辑器配上远程服务器的环境来营造一个最舒乎的姿势。最开始用VS Code的SFTP插件,但是用着还是不顺手,因为不能用远程的环境,最后.
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达作者丨张贶恩@知乎来源丨https://zhuanlan.zhihu.com/p/76578691编辑丨OpenCV与AI深度学习系统全面的相机标定课程:单目/鱼眼/双目/阵列 相机标定:原理与实战相机标定是机器人视觉中非常重要的一步,可以帮助机器人转换识别到的视觉信息,从而完成后续的控制工作,例如视觉抓取等等。笔者做过一些机器
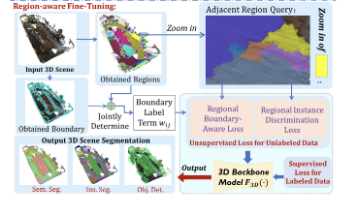
深度神经网络模型在封闭集设置和全标签训练下,在3D场景理解方面取得了显著进展。然而,当前3D识别方法的主要瓶颈在于,这些模型在各种实际应用中,无法识别训练类别之外的任何未见新类别。同时,当前最先进的3D场景理解方法主要需要大量高质量标签来训练神经网络,且仅在完全监督的方式下表现良好。因此,我们迫切需要一个框架,能够同时适用于3D点云分割和检测,特别是在标签相当稀缺的情况下。本文提出了一个通用且直接
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达本文仅作为学术分享,如果有侵权,会删文处理硕士研究生阶段如何学习slam机器人?作者:矮脚兽https://www.zhihu.com/question/396119527/answer/1256819922实验室的师兄刚毕业,都找的是slam方向的工作,自己也正在往这个方向努力.所以在这里总结以下学习...
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达在过去,你必须自己训练模型,收集训练数据,但现在许多基础模型允许你在它们的基础上进行微调,以获得一个能够检测目标并与用户用自然语言互动的系统。有数百种模型和潜在应用场景,目标检测在这些场景中非常有用,尤其是随着小型语言模型的兴起,所以今天我们将尝试使用MLX上的Qwen2-VL-7B-Instruct-8bit。我们将使用MLX
点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达本文转自|新机器视觉机器人视觉系统是指用计算机来实现人的视觉功能,也就是用计算机来实现对客观的三...
虽然看了很多说 GPT-5 是“编程新王”所谓的噱头和关于 GPT5 的评测,说实话,我还没看到一份有说服力的报告。它 get 到了设计的框架,却完全忽略了灵魂。它不仅给出了答案,还附上了一篇“小论文”:详细的推理步骤、全面的代码注释,甚至内置了测试用例,生怕你学不会。然而,在见识了 Opus 4.1 在第一轮中惊人的 token 消耗后,Rohit 出于对钱包的尊重,明智地让它“轮休”了。所以,