- @qq_41810539
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
你想了解CodeGeex、RooCode(袋鼠代码)和GitHub Copilot三款主流AI代码助手的优劣势对比,核心是想明确它们在不同使用场景下的适配性,方便选择或组合使用。下面我会从核心定位、核心优势、主要劣势、适用场景四个维度,清晰对比三者的差异
你想了解CodeGeex、RooCode(袋鼠代码)和GitHub Copilot三款主流AI代码助手的优劣势对比,核心是想明确它们在不同使用场景下的适配性,方便选择或组合使用。下面我会从核心定位、核心优势、主要劣势、适用场景四个维度,清晰对比三者的差异
文件是 Visual Studio Code (VS Code) 中用于配置任务(Tasks)的文件。文件是 Visual Studio Code (VS Code) 中用于配置调试会话的文件。是 Visual Studio Code (VS Code) 中用于配置不同类型任务的文件,它们各自有不同的用途和配置方式。这个配置会使用当前打开的 Python 文件作为程序入口,运行调试,并在 VS C

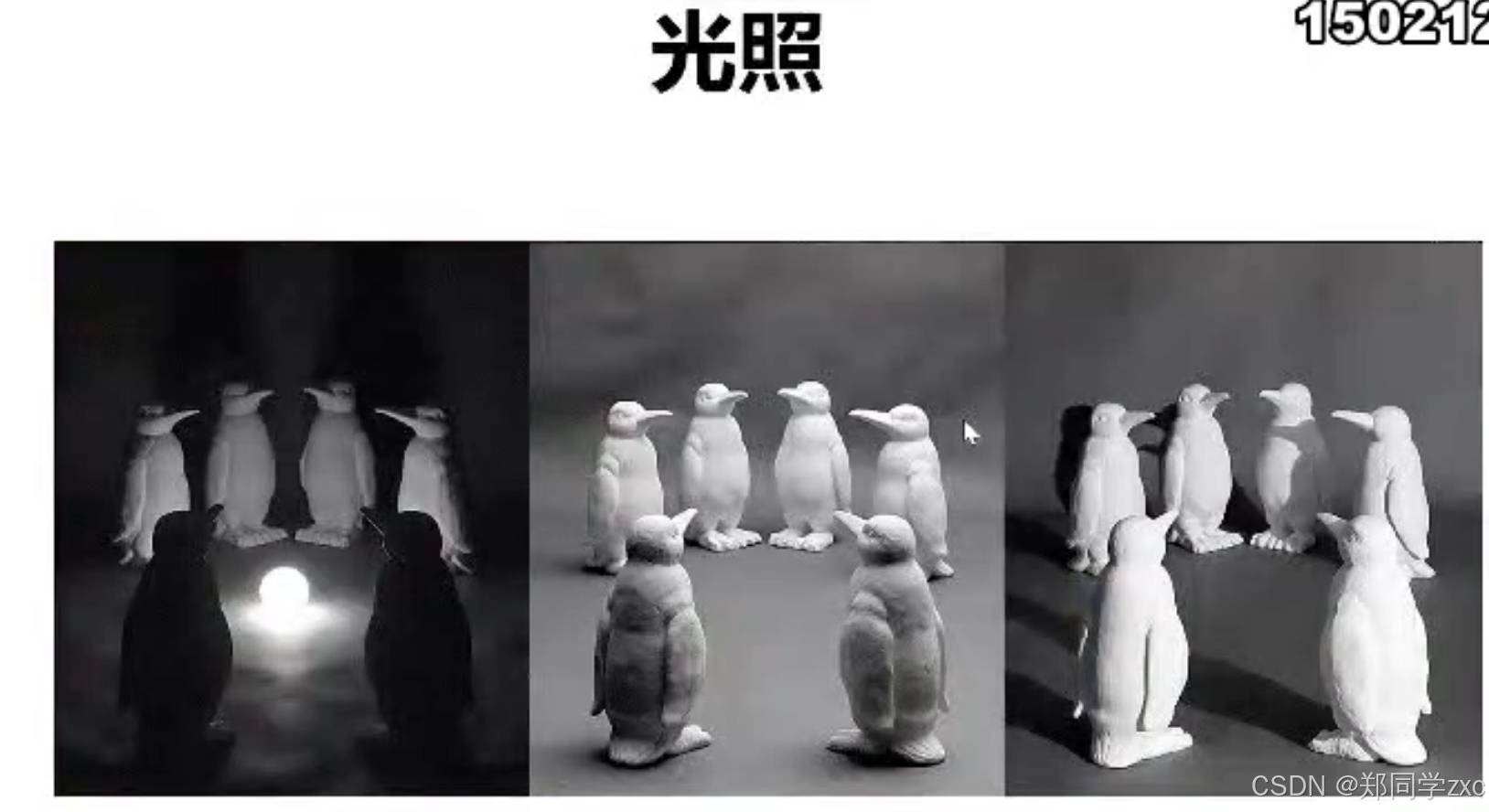
定义:图像分类任务是指给定一张输入图像,通过计算机视觉算法和模型,将其自动分配到预定义的一个或多个类别标签中。例如,输入一张动物的照片,模型需要判断这张照片中的动物是猫、狗还是其他种类。其本质是从图像的像素数据中提取有意义的特征,并根据这些特征进行分类决策。应用场景安防监控:对监控摄像头拍摄的图像进行实时分类,识别出人员、车辆、动物等不同类别,以便及时发现异常情况,如非法入侵、交通违规等。例如,在
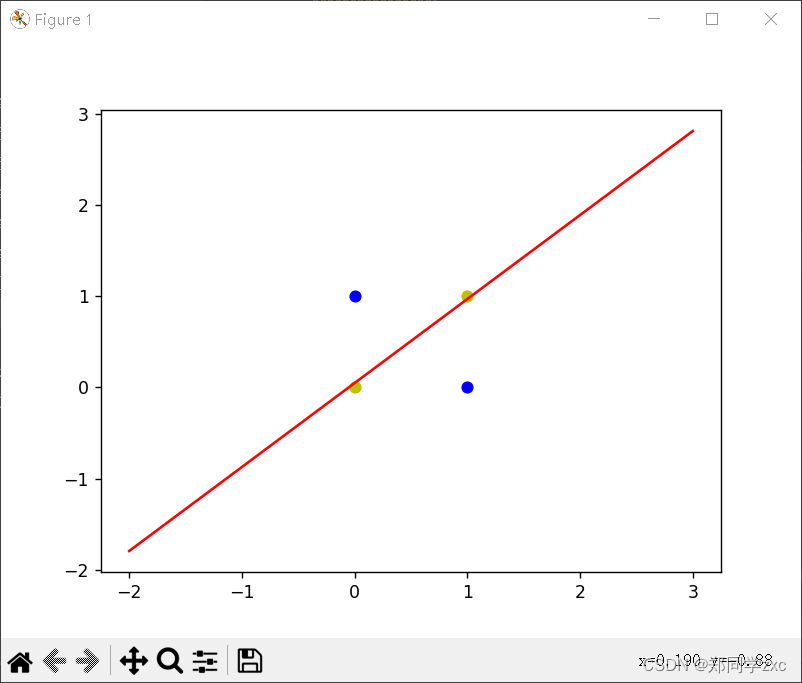
在神经网络中,线性神经网络(Linear Neural Network)通常指的是只包含线性变换(线性映射)的神经网络层,也被称为全连接层(Fully Connected Layer)或密集层(Dense Layer)。一个典型的线性神经网络层可以表示为:(y) 是输出向量。(W) 是权重矩阵。(x) 是输入向量。(b) 是偏置向量。这是一个线性变换,(W \cdot x) 表示输入 (x) 与权
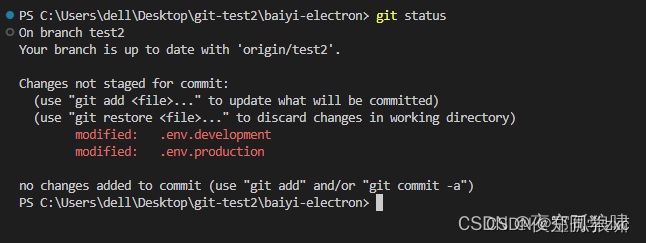
git fetch 获取远程分支更新git branch 查看本地分支git branch -r 查看远程分支git branch -a 查看所有分支(本地分支和远程分支)git branch -b dev 创建dev分支git checkout 切换分支git checkout -b dev 创建并切换到dev分支git clone 地址 克隆代码git pull 同步到本地(拉)git pus
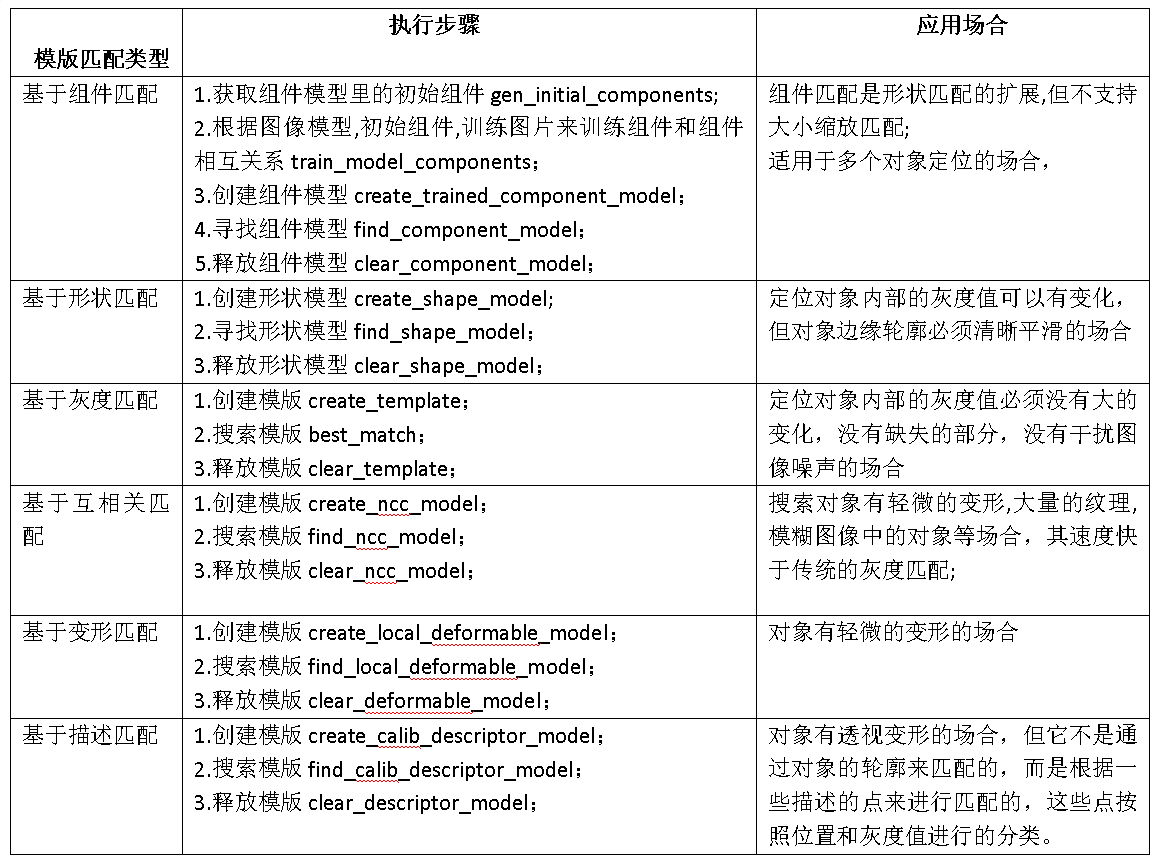
本文介绍了Halcon中的机器视觉定位技术,重点讲解了模版匹配的实现方法。首先,文章归纳了Halcon模版匹配的基本概念,并详细介绍了形状匹配算子的使用,包括图像金字塔(NumLevels)、角度步长(AngleStep)、优化算法(Optimization)、极性(Metric)和对比度(Contrast)等参数的设置。接着,文章通过代码示例展示了如何使用find_shape_model函数进行
在神经网络中,线性神经网络(Linear Neural Network)通常指的是只包含线性变换(线性映射)的神经网络层,也被称为全连接层(Fully Connected Layer)或密集层(Dense Layer)。一个典型的线性神经网络层可以表示为:(y) 是输出向量。(W) 是权重矩阵。(x) 是输入向量。(b) 是偏置向量。这是一个线性变换,(W \cdot x) 表示输入 (x) 与权
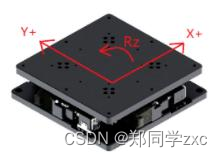
相对于XYθ平台采用传统的串联式设计,UVW平台则是采用并联设计,即将3个驱动轴放置于同一平面内,降氏平台厚度和重心,提高承载能力,这样做的好处就是,即便使用普通的步进马达驱动也可以达到较高的精度,通常能做到1个丝以内的精度,咱们这里不讲过多的硬件,只记录软件开发相关的逻辑代码,
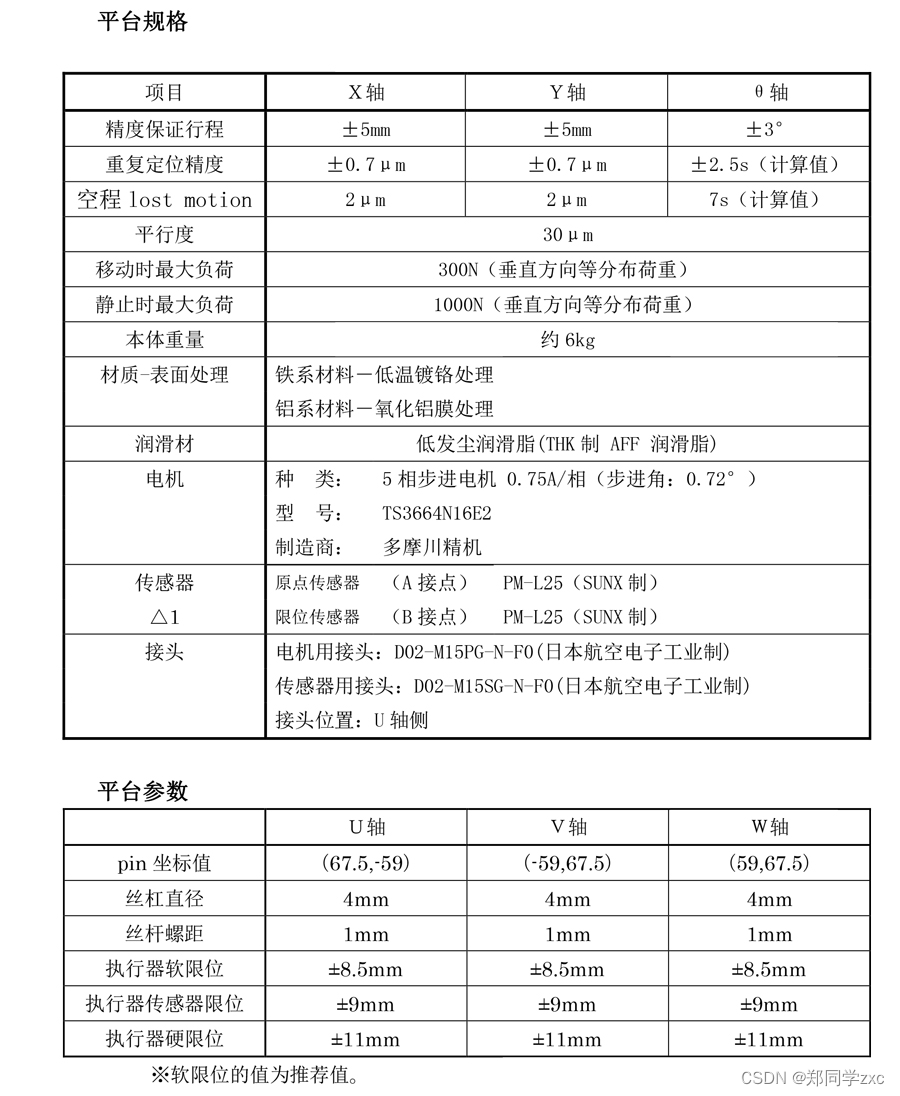
UVW对位平台,又称XXY、XYR 对位平台,属于三轴并联运动机构。通过3个线性移动轴的并联运动实现 X、Y 两轴线性运动和θz 轴旋转运动。UVW对位平台是高精度视觉对位系统中机械执行部分,主要应用在曝光机、邦定机、光罩印刷机、WAFER 对位、零件安装、PCB 钻孔机、LCD 点灯特性检查、切割机、贴片机(LCD/FPC)、网版印刷机等场合。正运动技术的UVW平台运动控制算法采用机械手FRAM