




- @qq_38364548
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
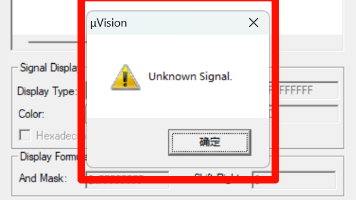
摘要:本文详细介绍了在Keil MDK中使用软件仿真器(Simulator)调试STM32F407项目的配置方法。主要内容包括:1)启用仿真器并正确设置芯片型号参数;2)解决访问外设寄存器时的权限错误问题,提供完整的仿真配置脚本;3)逻辑分析仪的信号添加技巧及常见错误解决方案。文章特别针对"access violation"错误给出了三种处理方案,并推荐通过全局变量间接观察引脚
本文详细介绍了基于STM32F4标准库快速部署FreeRTOS环境的完整流程。主要内容包括:1)硬件准备(STM32F407开发板)和软件需求(Keil MDK、标准外设库、FreeRTOS源码);2)基础STM32工程创建步骤;3)FreeRTOS内核源码结构解析及关键文件功能说明;4)详细集成步骤,涵盖源码添加、硬件适配层配置(ARM_CM4F)、内存管理方案选择(heap_4.c)及Free

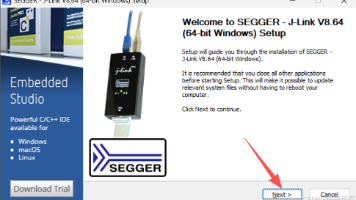
摘要: RTT(Real-Time Transfer)是SEGGER推出的高速嵌入式调试技术,利用调试通道实现MB/s级数据传输,无需占用串口引脚。本教程详解RTT优势、文件结构及集成方法:1)硬件需J-Link调试器和支持RTT的MCU;2)软件需安装V864版J-Link驱动包;3)工程集成时添加SEGGER_RTT核心文件,配置缓冲区大小。RTT支持多通道双向通信,适用于实时日志、性能分析等
本来还以为是系统问题,但是重新装完系统搭环境过后发现并不是,白白浪费一晚上时间,这不重要但是把自己的心态搞炸了,对自己产生了深深的怀疑,否定了自己前期的工作,也是自己太想成功了,而且今天运气是差极了迫不得已去签一个不想去的offer,去找书记签字去了4次都不在,自主实验也没有验证,程序也是各种出错电脑也关机不得终止实验,还收到一个非常想去的公司的拒绝,人生呀!太难受了!好在在凌晨两点半迎来转机。。

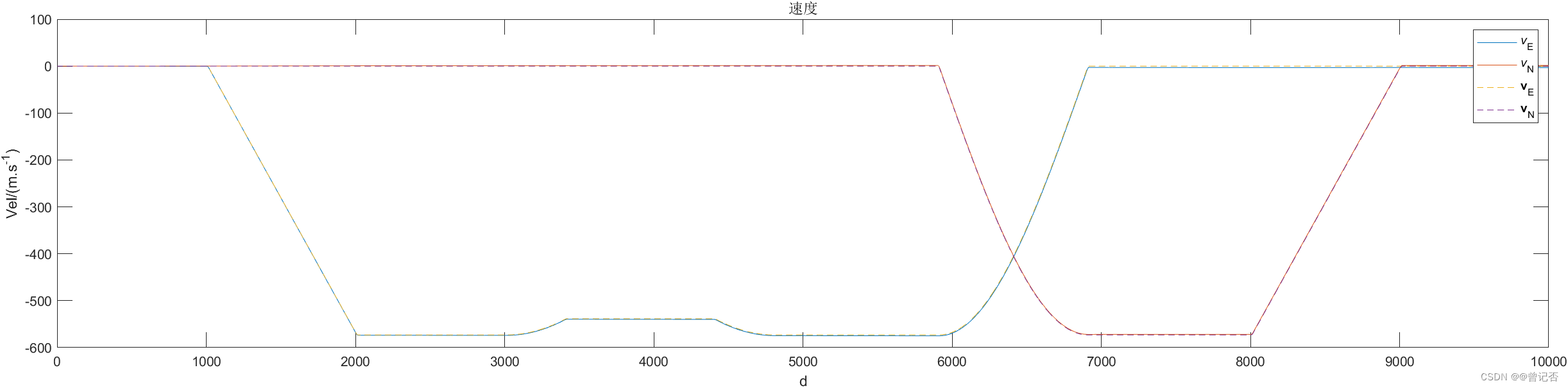
姿态更新求解方法是,先使用陀螺角增量的多子样采样计算等效旋转矢量,补偿转动不可交换误差,再使用等效旋转矢量计算姿态更新四元数。选取“东–北–天(E–N–U)”地理坐标系作为捷联惯导系统的导航参考坐标系,后面记为n系,则以 系作为参考系的姿态微分方程为。矩阵表示以i系作为参考基准,b系从m-1时刻到m时刻的旋转变化,表示以i系作为参考基准,n系从m-1时刻到m时刻的旋转变化,)进行了两次等间隔采样,
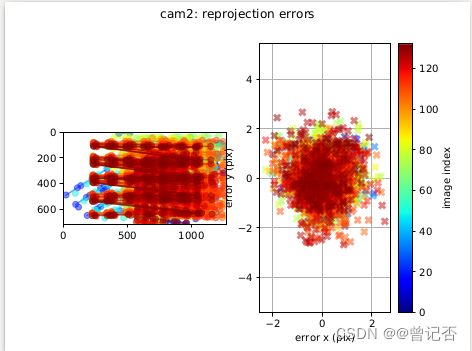
下载编译code_utils创建ros工作空间,用于code_utils以及后面的imu_utils,工作空间名和路径可以自己更改,code_utils和imu_utils都是imu标定需要用到的,用于标定imu噪声密度以及随机游走系数mkdir -p ~/imu_catkin_ws/srccd ~/imu_catkin_ws/srccatkin_init_workspacecd ..catkin
查看版本:打开终端,输入。
本文介绍了在Linux系统中创建GitHub仓库及管理代码的完整流程: 创建GitHub远程仓库 登录GitHub新建仓库,设置名称、描述和公开性 建议初始化README文件以便直接克隆 本地环境准备与配置 安装Git并配置用户信息 初始化本地仓库,添加并提交文件 关联并推送代码 将本地仓库与远程仓库关联 使用git push命令推送代码 处理Token认证问题 删除仓库方法 通过仓库设置中的Da
摘要 SEGGER RTT是一种高效的嵌入式调试技术,通过内存缓冲区实现双向通信,无需额外硬件接口。其优势包括高速传输、低资源占用和中断安全性。本文详细解析RTT核心API函数,包括缓冲区配置(SEGGER_RTT_ConfigUpBuffer)、数据输出(SEGGER_RTT_WriteString)和输入(SEGGER_RTT_GetKey)等功能,并提供初始化、通道分配和终端设置等实用技巧。
摘要: RTT(Real-Time Transfer)是SEGGER推出的高速嵌入式调试技术,利用调试通道实现MB/s级数据传输,无需占用串口引脚。本教程详解RTT优势、文件结构及集成方法:1)硬件需J-Link调试器和支持RTT的MCU;2)软件需安装V864版J-Link驱动包;3)工程集成时添加SEGGER_RTT核心文件,配置缓冲区大小。RTT支持多通道双向通信,适用于实时日志、性能分析等