- @qq_32205577
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
安全基础:加密传输保护敏感数据,证书验证防止伪造服务器可靠连接:通过重试机制和超时配置应对网络不稳定性生产就绪:会话管理、异常处理是构建稳定LLM应用的必备要素。
添加到cherry studio,检查,选择模型claude-3-7-sonnet,测试连接成功。,创建令牌,充值(支持wechat、Alipay),复制令牌。左下设置–>模型服务里的O3选项。
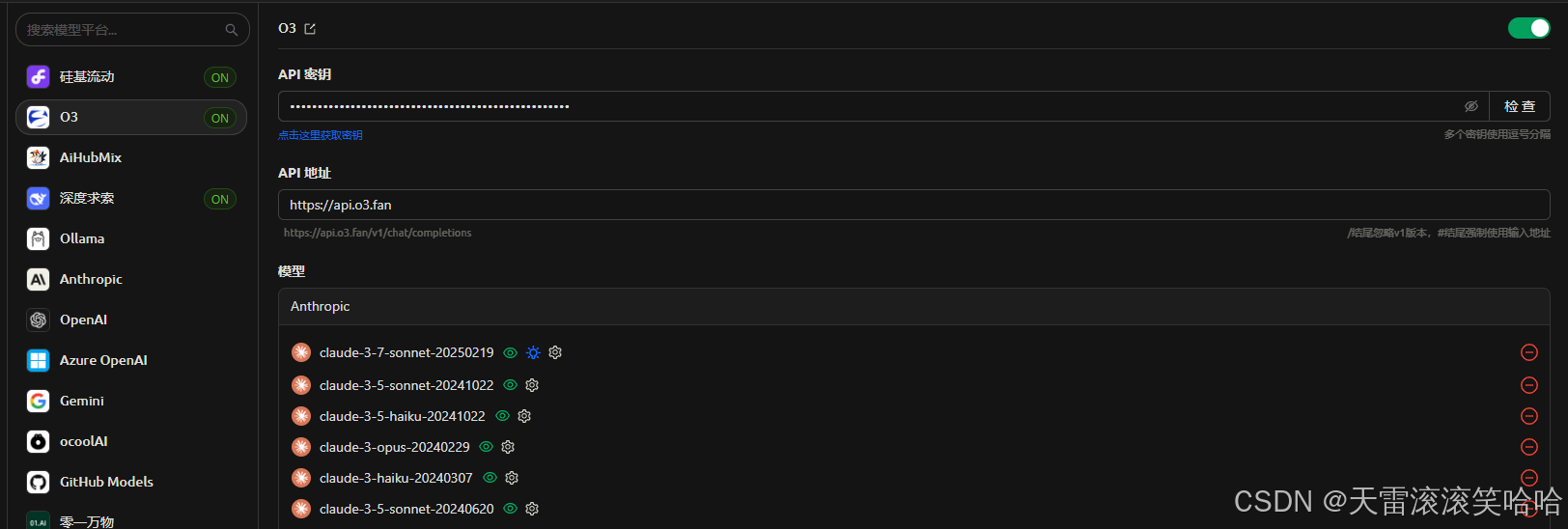
Claude 1.0 - 2022年首次发布,Claude的第一个版本Claude 1.3 - 改进版本,具有更好的推理能力Claude 2.x 系列 (2023)
Claude 1.0 - 2022年首次发布,Claude的第一个版本Claude 1.3 - 改进版本,具有更好的推理能力Claude 2.x 系列 (2023)
流水线(pipeline)实现通过.cnb.yml实现声明式流水线流水线主要能力:能力维度实现方式业务价值阶段隔离分离 build/deploy 阶段隔离构建环境、运行环境条件触发rules 匹配分支/tag测试环境自动部署生产制品管理推送 Docker 镜像至 CNB 制品库版本追溯,环境一致。
权限能力DeveloperMaintainerOwner创建项目✅✅✅创建分支❌✅✅推送代码到现有分支✅✅✅删除分支❌✅✅合并请求管理✅ (创建/评论)✅ (审核/合并)✅保护分支设置❌✅✅添加/删除项目成员❌❌✅删除仓库❌❌✅CI/CD流水线配置❌✅✅。
检测环境:存在油污、振动、不恒定光照的生产现场目标特性:螺栓尺寸:M6-M20规格松动表现:2-15°的旋转偏移或0.5-2mm的轴向位移系统要求:检测精度:角度误差≤0.5°,位移误差≤0.2mm响应速度:单点检测≤100ms适用距离:0.5-3m拍摄范围。
MCA(掩模比较法):基于U-Net分割路障生成掩膜,连续帧间差分检测缺失部件,指数平滑更新参考模板。标准图差值法:实时图与标准模板做差值,通过阈值分割提取缺失区域(如轴承滚珠缺失)。
云原生开发:本地出问题?直接连CNB的云端环境,继续写代码、调功能,不用等修电脑;云原生构建:代码定版后,用CNB的构建能力搭CI/CD,自动打包、测代码、发镜像,解决“手动流程慢”的问题;关键技巧:利用缓存进行云原生构建,把重复工作交给云端,聚焦业务本身。云原生的本质,是让开发者“不用管底层”,专注业务实现,此为云原生的“落地感”。
(搭建环境)用win10玩dify:(wsl+ubuntu22.04+docker-desktop)