- @qin_liang
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
DROID-SLAM 复现

opencv安装记录
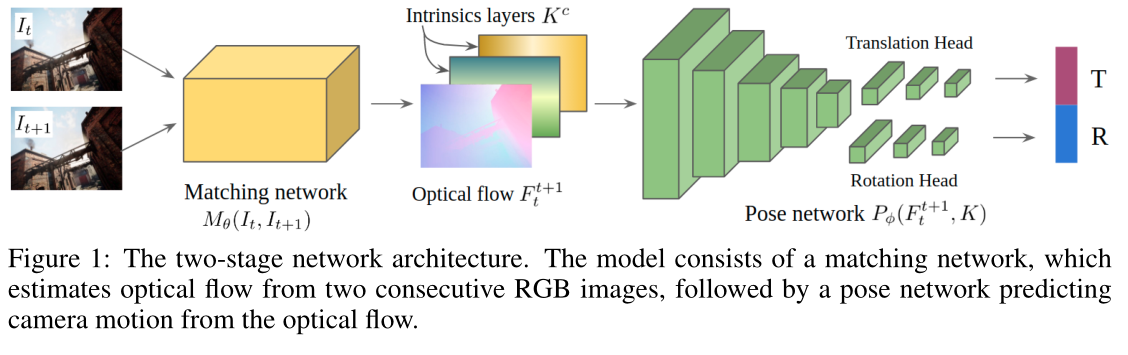
基于学习的VO 相关:DeepVO Towards End-to-End Visual Odometry with Deep Recurrent Convolutional Neural Networks(ICRA,2017)TartanVO: A Generalizable Learning-based VO(CoRL2021)SimVODIS: Simultaneous Visual Odom
参考链接2.直接使用,在浏览器打开,这里设置的端口是6080,在服务器执行这个命令运行之后在浏览器输入服务器ip:6080,比如我的就是就可以直接连接到桌面3.使用vnc连接VNC下载地址:提取码: nhcp 复制这段内容后打开百度网盘手机App,操作更方便哦用以下命令在服务器创建容器的话就可以通过5900端口从VNC连接docker页面。

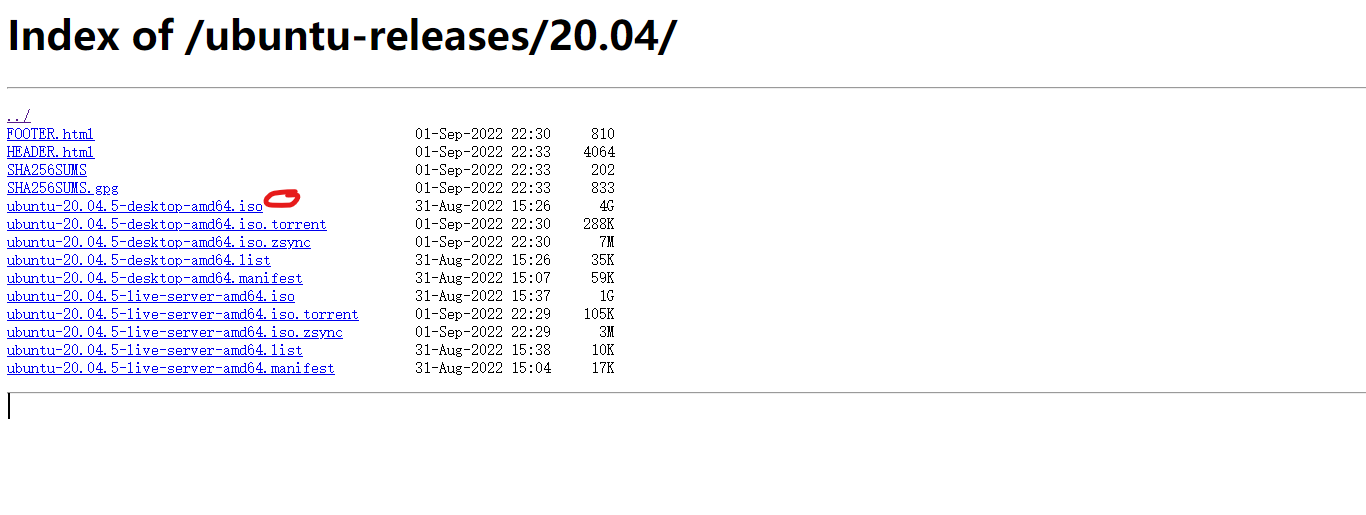
这里面把整体性的东西说的很清楚,这里我主要记录对这个机型的一些特别不一样的地方。4.第二次启动时,进入bios,要把ubuntu启动项调到前面。不要用那个只有2.7G左右的iso,要不然会遇到驱动的问题。1.一定要先解决磁盘的bitlocker状态,那个有影响。2.插上U盘第一次启动要在bios先关闭secure。3.选择的ubuntu20的版本要选最新的。到这个链接下载这个iso文件进行烧录。
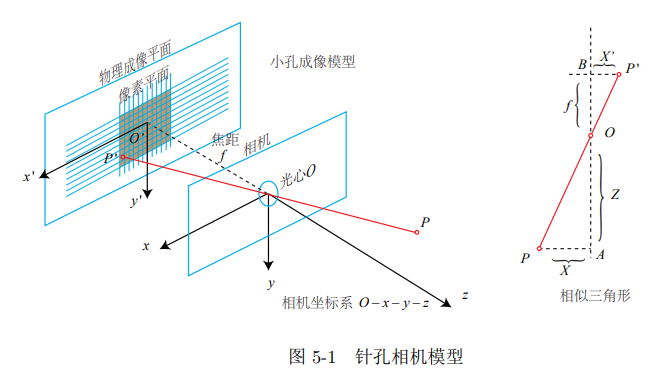
基本模型内参外参。
1.1 实验一:图元的生成:直线、圆椭区域填充你需要完成基本的图元生成算法,包括直线和椭圆。在区域填充中,要求你对一个封闭图形进行填充。你需要绘制一个封闭图形(例如多边形),并选择一种算法进行区域填充。你的作品应当有一定的交互功能,例如,通过鼠标确定控制点来获得以上图形。1.2 实验二:样条曲线的生成: Bezier Bezier 曲线、B-样条曲线的生成:你需要完成这两种曲线的生成。对于桂栭样条

2.在类似这样的文件夹/home/ql/pan1/catkin_ws/devel/lib/rosbag2tum下运行。5.配置rosbag2tum文件夹下的CMakeLists.txt。4.进入生成的rosbag2tum里面的src。(修改自己对应的rosbag包里面的节点)3.创建catkin_ws/src文件夹。5.在catkin_ws文件夹下运行。2.查看rosbag中的topic。这个文件