




- @m0_71102932
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基于kvasir v2胃病数据集对ResNet,ResNext,DenseNet,Shufflenet等进行测试,对比了这几个模型的效果

OpenArm机器人双臂模型的仿真从零部署涉及多个关键步骤。搭建仿真环境需要选择合适的工具,如ROS和Gazebo,并配置相关依赖库。
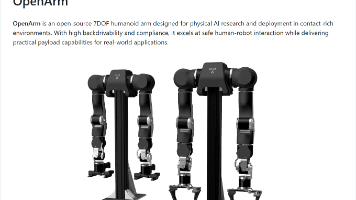
OpenArm机器人双臂模型的仿真从零部署涉及多个关键步骤。搭建仿真环境需要选择合适的工具,如ROS和Gazebo,并配置相关依赖库。
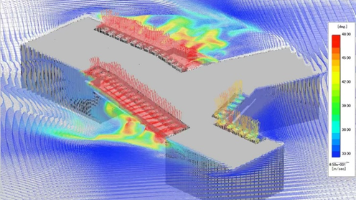
工厂异常热环境是引发工作人员中暑与热疲劳的重要诱因,准确预测室内温度场分布对保障职业健康防护至关重要。工厂内热源数量多、分布不规则,且空气介质传热效率低、热响应迟缓,使用物理信息神经网络(Physical Information Neural Networks,PINN)预测温度场时易产生边界残差累积、局部细节丢失、边界与高温区预测失真等问题。本文提出改进型PI-Unet++模型,通过PAD-A
本文章是成功在pycharm中配置python3.9的环境,手把手教你去配置,配置好一个python环境后续才不会因为环境问题导致各种运行错误的发生。

在轻量模型中,表现最佳,具有最高的准确率。在中量模型中,在F1分数和召回率上表现最好。在重量模型中,表现最佳,具有最高的准确率和F1分数。所有模型中,在中量模型类别中表现最为优秀,具有最高的F1分数和召回率,准确率也非常高,是综合表现最好的模型。重量模型虽然在准确率和F1分数上表现良好,但文件大小较大,可能不适合对存储空间有限制的应用场景。轻量模型中,准确率最高,适合对计算资源有限制的环境。如果对

基于kvasir v2胃病数据集对transformer模型(vit,st,deit)以base基准型进行测试,对比了这几个模型的效果

本文旨在为初学者和开发者提供一个详细的指南,介绍如何将个人或团队的项目上传至 GitHub —— 全球最大的开源代码托管平台。无论你是编程新手还是希望扩展项目影响力的资深开发者,本指南都将一步步引导你完成从创建 GitHub 账户到成功推送代码的全过程。文章涵盖了初始化本地 Git 仓库、解决合并冲突、使用 GitHub 功能。通过阅读本指南,你将学会如何在 GitHub 上展示你的项目,从全球开
