




- @m0_60673426
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
vscode的dev_container插件可以实现在vscode进入正在运行的容器开发请先启动容器后再往下看!!请先启动容器后再往下看!!请先启动容器后再往下看!!3.进入使用命令行进入vscode启动后右下角有此警告为成功。也可顺便安装其他插件:ROS、C/C++、python、chinese、catkin_tools......

升级到3.2版本后,OpenClaw的权限收紧,当你查看代理-tool中全是灰色的。
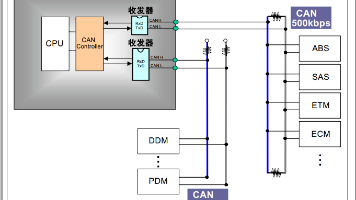
本文摘要: 三种通信协议对比分析:1)CAN总线采用双绞线差分传输,支持闭环(1Mbps)和开环(125Kbps)两种模式,具有仲裁机制和CRC校验;数据帧包含识别码、控制位、数据段和应答场。2)UART通过RX/TX双线异步通信,需共地和匹配波特率,数据帧含起始位、数据位和校验位。3)I2C采用SCL/SDA双线同步通信,支持主从模式,通过地址寻址和ACK应答机制实现半双工传输,数据帧包含设备地
本文介绍了OpenClaw AI助手的安装配置流程。系统要求Node.js≥22.x版本,建议4GB以上内存和5GB磁盘空间。详细说明了Node.js安装注意事项,包括不勾选Tools for Native Modules选项以避免下载冗余工具,以及设置环境变量的方法。安装OpenClaw需以管理员身份运行PowerShell执行指定命令。完成安装后需运行初始化配置命令,选择大模型API和消息平台
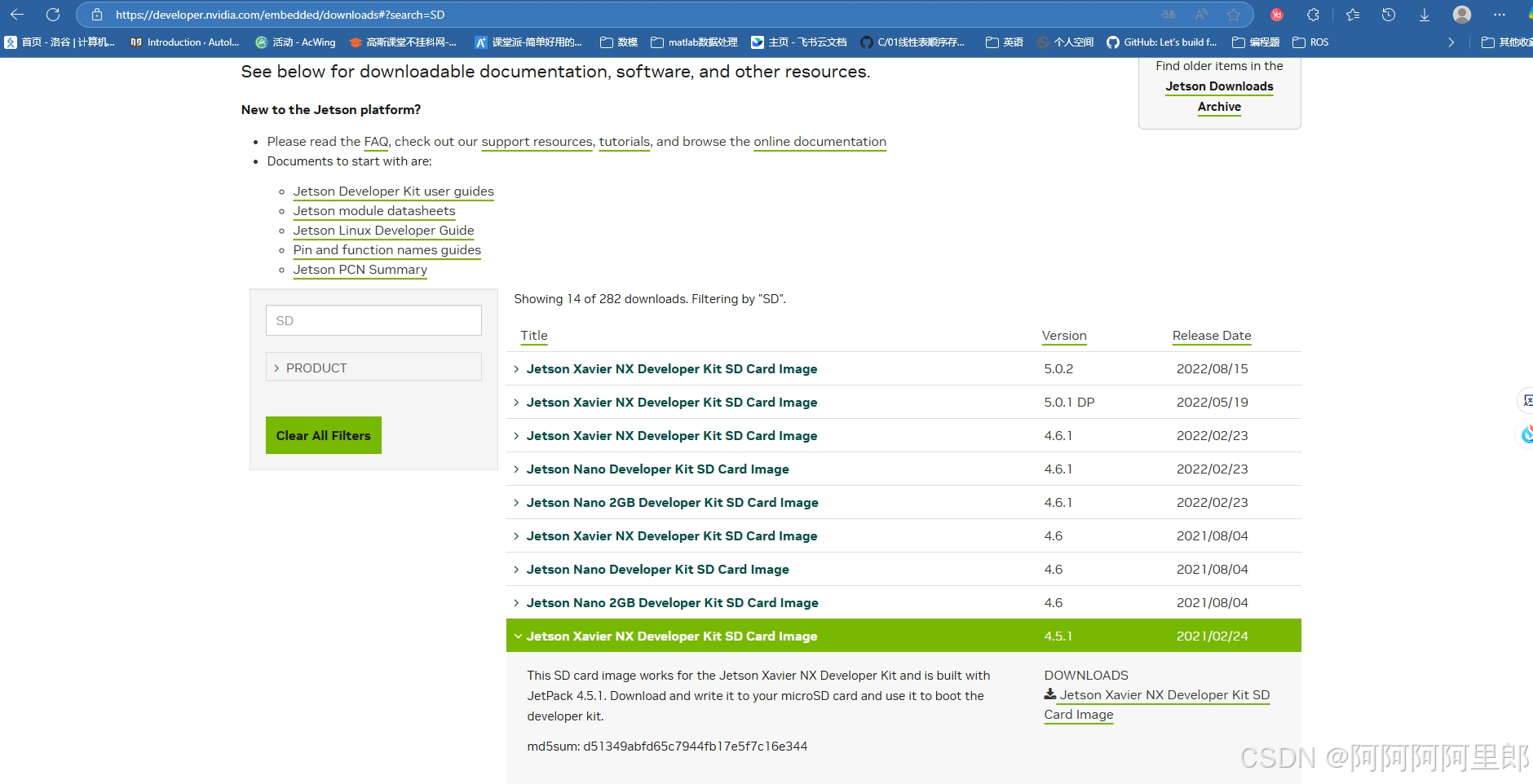
0.准备工作1.下载镜像2.镜像烧录3.更换国内源4.安装ROSmelodic5.Archiconda安装
文章摘要:在电机驱动方案选型中,对比了亚博四路驱动板(串口控制简单)和TB6612驱动板(代码迁移容易但接线复杂),最终选择亚博驱动板实现四轮差速控制。系统采用"虚拟两轮"简化策略,将左右侧轮组同步控制(vL/vR),通过速差实现转向。编码器反馈取两侧轮速平均值,形成闭环控制。该设计兼顾了接线简便性与控制逻辑清晰性。
已知两个关节的角度(θ₁和θ₂),求脚底的位置坐标(x, y)。
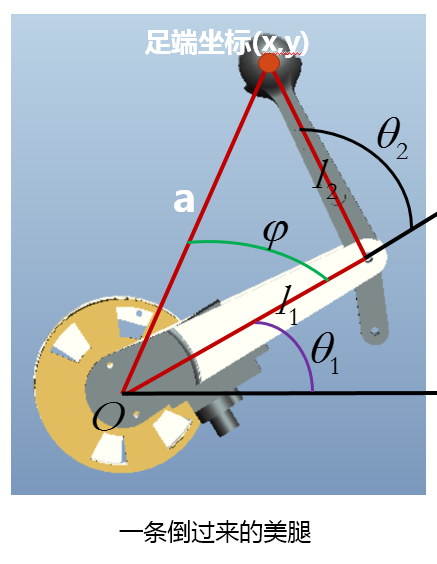
髋关节扭矩:τ髋=m⋅g4⋅L1膝关节扭矩:τ膝=m⋅g4⋅L2。