




- @m0_48948682
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
针对传统的虚拟现实技术存在速度慢和模型与现实物体尺度之间存在偏差的问题,提出模型基于 VR 的移动机器人的真实环境三维建模系统。
工作内容效果提升复杂环境中目标检测的效果采用通道注意力机制对YOLO-V3进行改进,增强网络对图像特征提取的能力平均识别率较改进前增加0.32%针对目前姿态估计角度存在离散性的问题提出一种基于VGG-16主干网络嵌入最小面积外接矩形(MABR)算法,进行抓取位姿估计和角度优化改进后的抓取角度与目标实际角度平均误差小于2.47°搭建了一套视觉抓取系统利用UR5机械臂、气动两指机械手、Realsens
工作内容效果提升复杂环境中目标检测的效果采用通道注意力机制对YOLO-V3进行改进,增强网络对图像特征提取的能力平均识别率较改进前增加0.32%针对目前姿态估计角度存在离散性的问题提出一种基于VGG-16主干网络嵌入最小面积外接矩形(MABR)算法,进行抓取位姿估计和角度优化改进后的抓取角度与目标实际角度平均误差小于2.47°搭建了一套视觉抓取系统利用UR5机械臂、气动两指机械手、Realsens
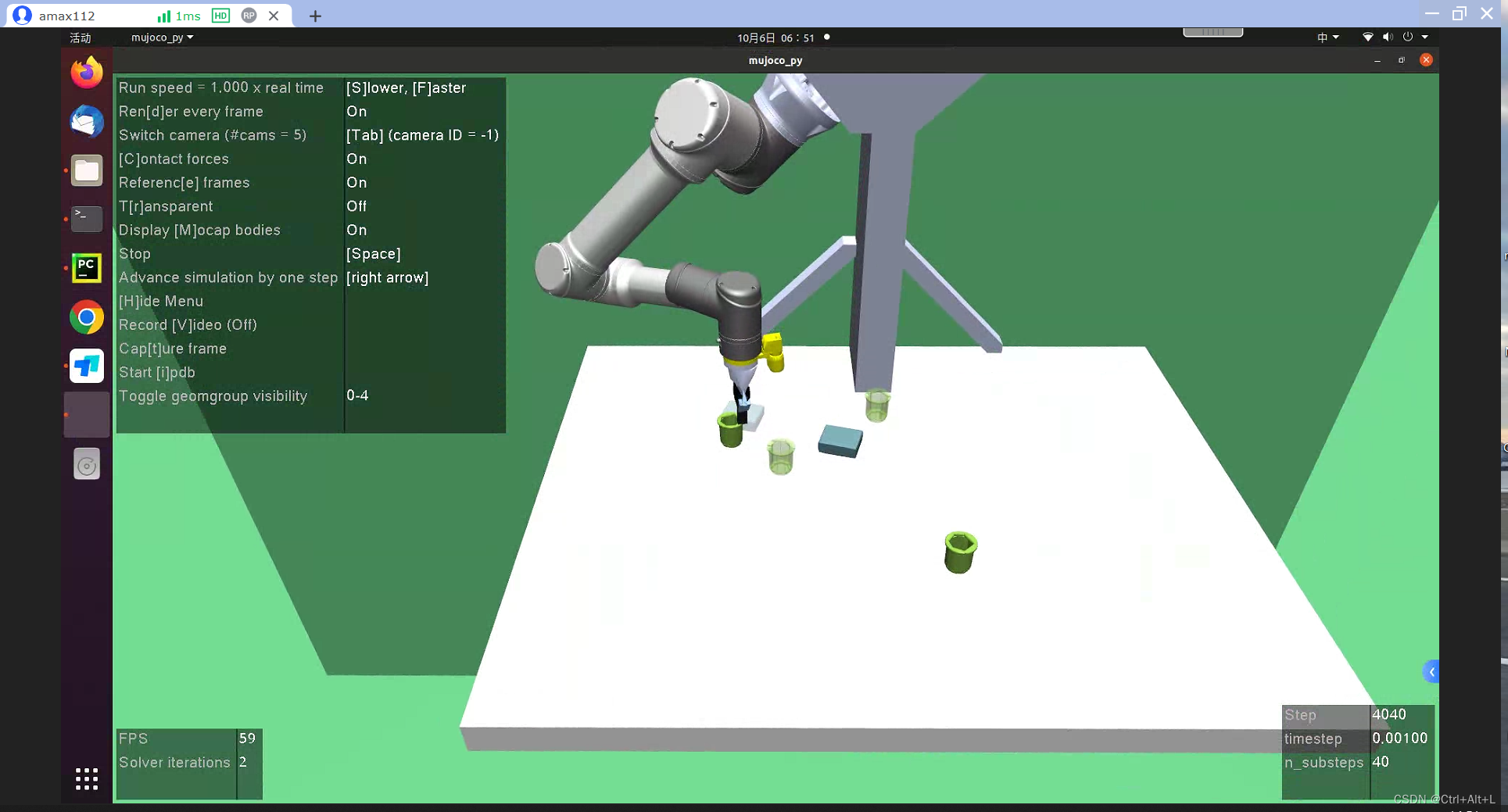
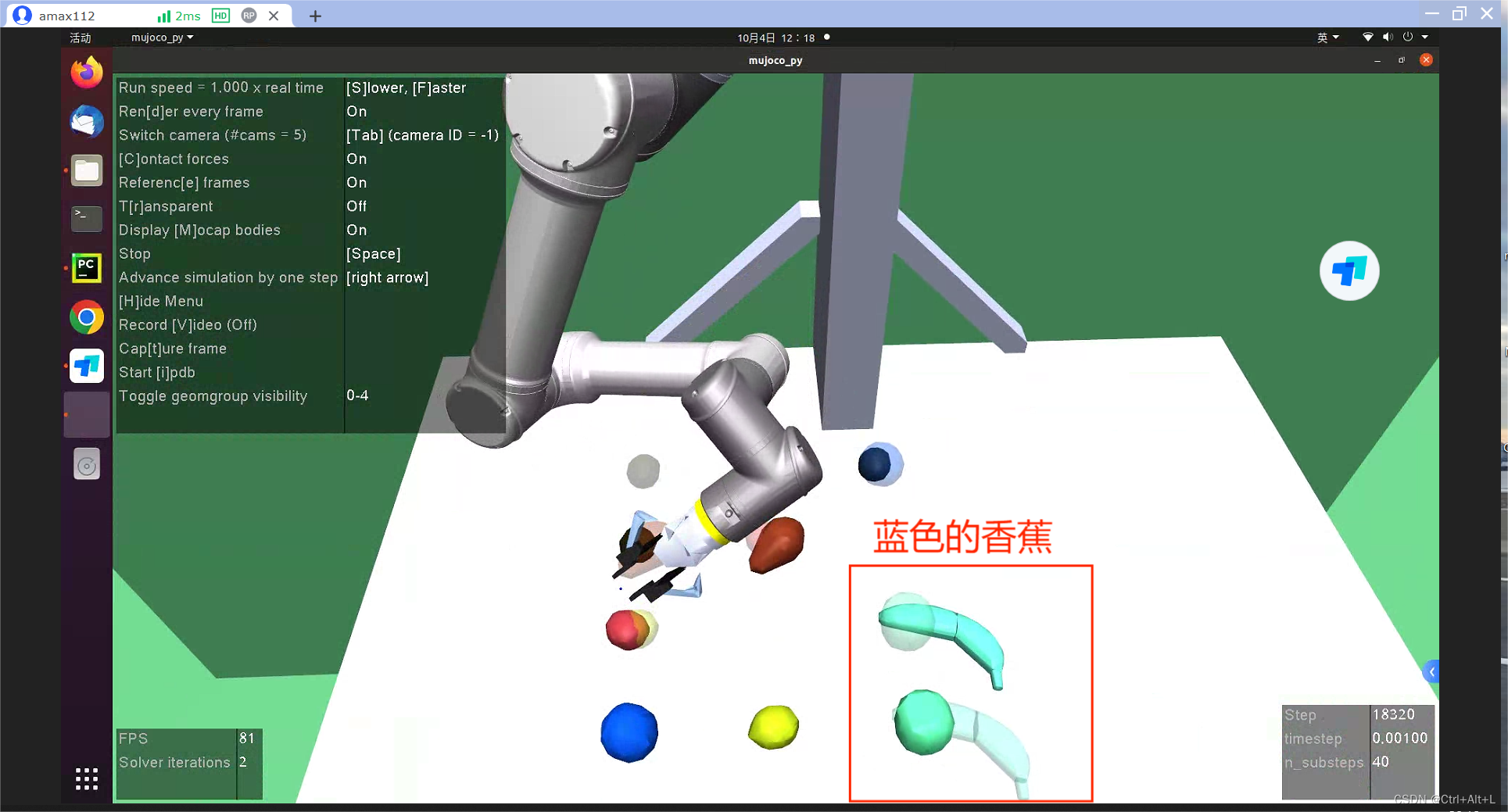
robogym 基于 mujoco 搭建,构建了一个仿真机械臂桌面物体操作(pick-place、stack、rearrange)场景
基本介绍深度学习、强化学习;介绍深度强化学习流行算法;深度强化学习在机器人操作领域的应用现状;未来的发展方向作出总结与展望;深度学习通过学习深层的非线性网络结构和数据集的本质特征,实现函数的逼近。智能体在与环境交互的过程中,利用强化学习通过不断试错和最大化累积奖励来生成最优的行为策略。学者工作论文DeepMind将深度强化学习算法应用到连续动作领域,比如机器人操作和运动Heess基于分布式近端策略
【方法】Ubuntu系统录屏webm格式mp4格式方法。
robogym 基于 mujoco 搭建,构建了一个仿真机械臂桌面物体操作(pick-place、stack、rearrange)场景
Robogym 基于 mujoco 搭建,构建了一个仿真机械臂桌面物体操作(pick-place、stack、rearrange)场景。
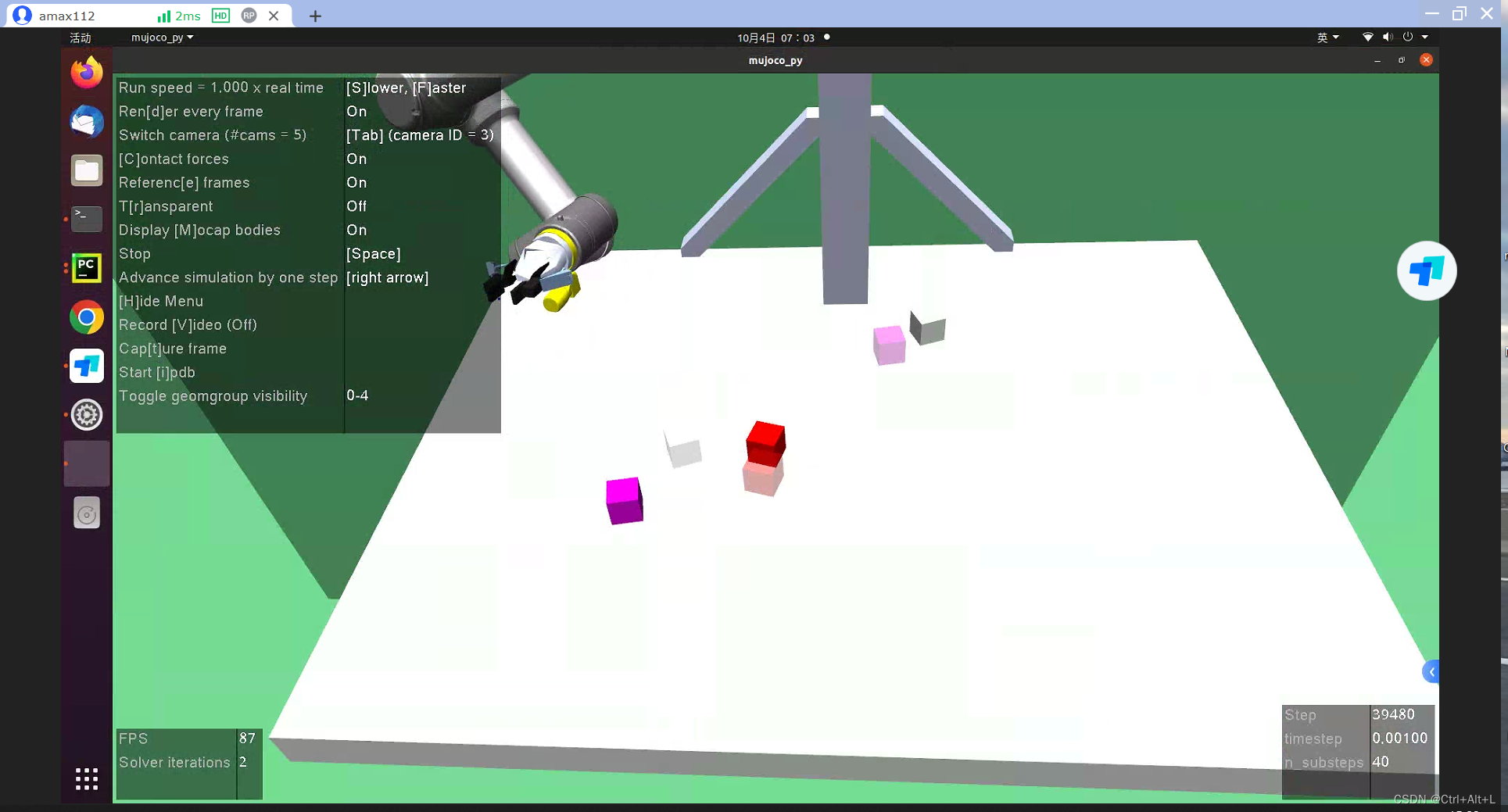
robogym 基于 mujoco 搭建,构建了一个仿真机械臂桌面物体操作(pick-place、stack、rearrange)场景。
针对问题:需要考虑温度特性的密集物体抓取提出模型:一种基于深度强化学习的密集物体温度优先推抓(TPG)方法方法涉及一种深度Q网络算法,以RGB-D图像与红外图像作为输入,使用两个全卷积网络(FCN),将推动和抓取放在一个框架内联合动作,输出对应的Q值,指导机器人对密集物体进行推抓动作,并与环境交互获得奖励。机器人的抓取需考虑有温度优先性,在抓取过程中最大程度地优先抓取高温物体,以降低对设备与环境的