




- @lzzzzzzm
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
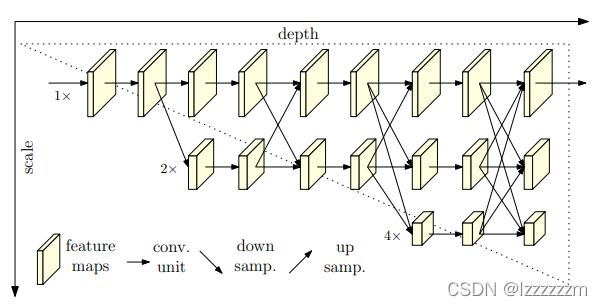
保持空间与语义信息的backbone文章目录系列文章目录前言一、pandas是什么?二、使用步骤1.引入库2.读入数据总结前言虽然说这是一个图像分类的合集博客,但其实都是在介绍一些backbone网络。这次介绍的是HRNet,虽然说这个网络最初设计是做为关键点检测使用的,但其优秀保留空间信息的同时拥有高语义的特点,使其做为提取特征的backbone,也有很多优点。提示:以下是本篇文章正文内容,下面
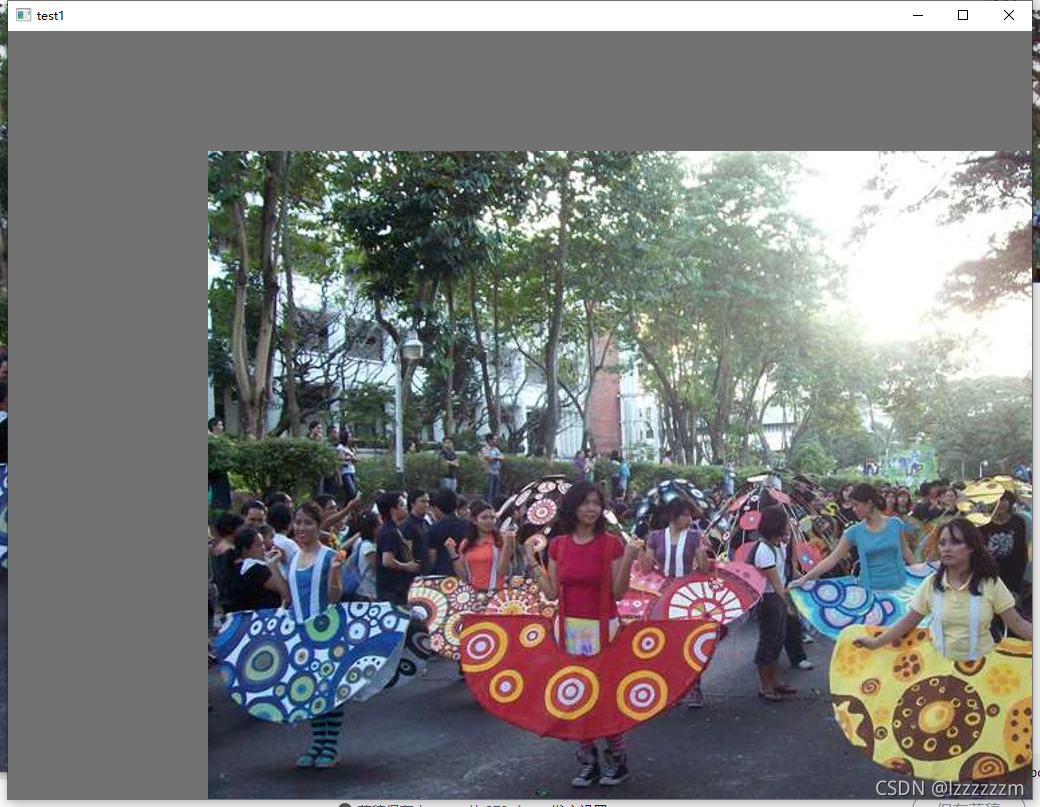
Pytorch机器学习(八)——利用TORCHVISION.DATASETS和pycocotools读取coco数据集并可视化目录Pytorch机器学习(八)——利用TORCHVISION.DATASETS和pycocotools读取coco数据集并可视化前言一、数据集格式二、利用pycocotools以及torchvision.datasets读取数据集结果前言coco数据集网上介绍比较多,这里

Spatial Attention空间注意力及Resnet_cbam实现前言一、Attention表达改进二、SpatialAttention空间注意力三、Resnet_CBAM总结前言上一次介绍Renest时,介绍了CNN里的通道注意力Channel-Wise的Split Attention及其block实现这一次介绍一下另外一种注意力,空间注意力和CBAM结构。下面是我实现resnet中加入C
STM32称重传感器+HX711的使用——HAL库文章目录STM32称重传感器+HX711的使用——HAL库前言一、接线二、CubeMax配置三、代码编写注意点前言因为在一个项目中使用到了称重传感器,在此记录一下其使用方法还有一些需要注意的地方。首先介绍一下使用的传感器HX711——一款专用于电子秤的A/D转换芯片称重传感器(使用的这一款量程200KG)一、接线买到传感器后,可以看到后面尾巴引出了
保持空间与语义信息的backbone文章目录系列文章目录前言一、pandas是什么?二、使用步骤1.引入库2.读入数据总结前言虽然说这是一个图像分类的合集博客,但其实都是在介绍一些backbone网络。这次介绍的是HRNet,虽然说这个网络最初设计是做为关键点检测使用的,但其优秀保留空间信息的同时拥有高语义的特点,使其做为提取特征的backbone,也有很多优点。提示:以下是本篇文章正文内容,下面
在3D目标检测中,可以大致分为基于图像、基于点云和基于多模态融合的三种方法。而基于点云处理的3D目标检测中,如何有效处理点云数据信息是其中的重点。常见的处理点云的方法有两种,一种为将无序的点云处理成有规则的体素或者柱体(voxel or pillar)等来进行处理,被称为Voxel-Based,另一种则是直接在原始点云上进行操作的Point-Based方法。本文主要介绍如何Point-Based中

Pytorch机器学习(五)——目标检测中的损失函数(l2,IOU,GIOU,CIOU)目录Pytorch机器学习(五)——目标检测中的损失函数(l2,IOU,GIOU,CIOU)前言一、l2范数损失二、IOU损失二、GIOU损失三、CIOU损失总结前言目标检测领域,从发展到现在这个阶段,出现过很多次有关预测框损失函数的讨论与更新,从l2范数损失,到IOU损失,GIOU损失,DIOU损失等等,今天
Pytorch机器学习(四)——YOLOV5训练自己的数据集(以VOC格式为例目录Pytorch机器学习(四)——YOLOV5训练自己的数据集(以VOC格式为例前言一、准备工作1.引入库二、使用步骤1.引入库2.读入数据总结前言使用YOLOV5训练自己的VOC数据集,首先就是需要将VOC数据集转化到YOLO格式YOLO格式是什么,和如何转换,可以看我上一篇博客Pytorch机器学习(三)——VOC
Pytorch机器学习(七)——图像增广之仿射变换文章目录系列文章目录前言一、pandas是什么?二、使用步骤1.引入库2.读入数据总结前言YOLOV5的图像增强技术中有十分多可以学习的地方,这里记录一下其中的仿射变换。一、平移变换平移变换矩阵如下代码如下T = np.eye(3)# 这里注意一下,图像的左上角是0,0,a为正表示向左,负为右,b为正表示向下,负为上T[0, 2] = random
Pytorch机器学习(一)——FashionMNIST分类实现文章目录Pytorch机器学习(一)——FashionMNIST分类实现前言一、代码1.引入库2.加载数据集2.1调用datasets2.2 调用DataLoader构建minibatch3.定义模型4.开始训练模型4.对模型训练结果进行评估5.对模型进行多次训练6.保存模型总结前言知道机器学习的,应该都对FashionMNIST数据