- @lagougongzuoshi
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
整个系统消耗8207个逻辑单元,时钟频率100MHz,处理一帧640×480图像仅需0.128ms,延迟极低,满足实时性要求。背景差分法则需建立并更新背景模型,本设计采用单高斯背景模型,每个像素均有高斯分布描述其背景亮度,均值和方差通过学习速率更新。系统上电默认为帧间差分模式,连续三帧如果运动目标数量骤减且背景亮度变化超过阈值,则启动背景重建并切换为背景差分模式。在公路车辆场景测试中,该FPGA系
在模拟化工园区地图(50m×50m,包含储罐区、管廊、道路等障碍物)上进行测试,与传统蚁群算法、遗传算法和标准麻雀算法对比。在化工园区实地测试中(面积约20000平方米),改进算法构建的地图全局一致性误差为0.08m,而标准Cartographer的误差为0.21m。系统在实际化工园区部署运行3个月,机器人自主巡检成功率为96.8%,累计巡检里程超过300公里,共发现4处阀门泄漏隐患,巡检效率比人
结合高层小区供水的具体需求,设计了一套结构简洁、性能优越的恒压供水监控系统。系统设计中结合了PLC和变频技术,进行了合理的硬件和软件设计,以及传感器和相关控制系统设备的选型。针对我国城市高层小区供水的需求,恒压供水监控系统的设计目标是确保供水压力稳定,同时实现能源的高效利用。此外,对复杂供水系统中泵组并联运行时的流量和能耗进行了分析,确定了供水系统的近似等效数学模型,为控制算法的设计提供了理论依据
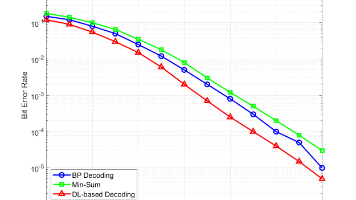
这一成果打破了传统方法对先验知识的依赖,证明了深度特征提取网络在处理一维通信信号时的强大表征能力,为后续的参数估计奠定了坚实的分类基础。该框架设计了一个共享的特征提取主干网络,用于捕捉信号的通用底层特征,随后分叉出两个独立的分支网络,分别用于纠错编码类型的识别和交织类型的识别。这种方法的优势在于它模拟了人类同时处理关联任务的认知机制,不仅减少了模型的参数总量和推理时间,还通过任务间的相互正则化作用
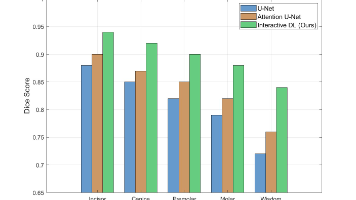
考虑到注塑工件通常具有复杂的三维几何形状,单一视角的相机难以完整覆盖工件的全部表面区域,本研究设计了多工位视觉检测系统,通过在不同方位布置多个工业相机,实现对注塑工件上方、下方和四周等多个表面区域的同步图像采集,确保缺陷检测的全面性和完整性。随后,使用专业的图像标注工具对所有包含缺陷的图像进行精确的边界框标注,制作成符合深度学习目标检测任务要求的标准数据集,并按照训练集、验证集和测试集六比二比二的
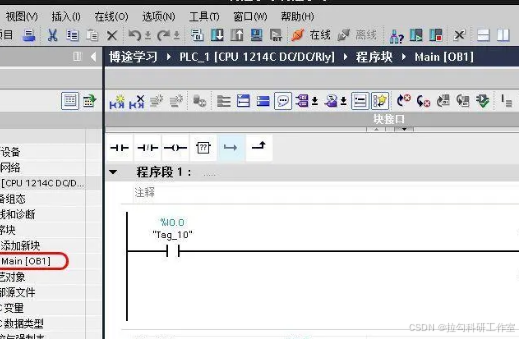
PLCopen标准为工业自动化的功能模块提供了通用的编程接口,因此在该平台中,我们设计了符合PLCopen标准的机器人运动控制功能块,使得用户可以通过这些模块化的功能块来实现对工业机器人复杂动作的编程和控制。通过该系统,学生不仅可以控制机器人执行简单的位移任务,还可以根据任务需要编写更为复杂的动作控制程序,平台提供的示教模块可以记录和回放机器人动作,使学生在练习中更加直观地理解机器人运动的规律和控

(2)交通冲突形成机理和冲突特性分析。安全评价需将冲突数据转化为可比指标,总冲突数受流量影响大,故采用冲突率即单位流量下的冲突数,和严重冲突率即严重冲突占总冲突比例,作为评价指标。单因素影响分析逐一考察交通量、车型比、车速、车道数、收费亭效率、环境条件等因素的影响趋势,如交通量增加冲突率上升,大型车比例高加剧严重冲突,据此提出改善建议:优化车道设计增加专用车道,安装可变限速标志平滑速度过渡,加强驾
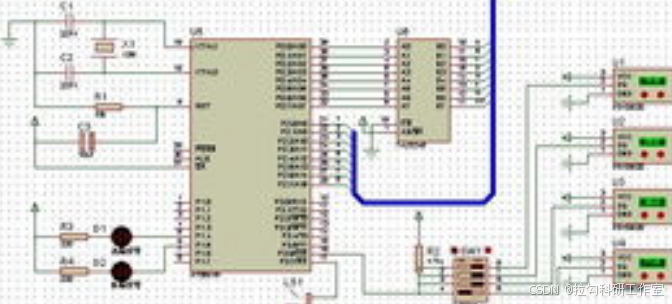
传感器模块采用了SDI-12总线标准,连接了多个水位、流量、温度和湿度传感器,通过TDC40(SDI-12 to RS232转换器)将传感器采集到的水情数据发送到单片机P0口。为了提高数据采集的准确性和实时性,我们采用了SDI-12总线标准,该标准支持多个传感器的连接,具有高精度和低功耗的特点。为了确保数据的完整性,我们设计了数据校验机制,通过CRC校验码对数据进行校验,避免数据传输过程中的错误。
同时,物料输送的交流伺服系统为机械手的高效工作提供了支持,本文对变频器的硬件设计、参数设置和接线方式进行了详细的描述,确保输送过程的稳定和可控性。此外,本文利用组态王软件对整个系统进行了仿真和监控,通过组态画面实时显示系统的运行状态,包括物料的数量、分拣的种类、机械手的动作等,便于管理者对系统进行监控和调试。通过对这四个单元的协调设计,系统能够实现对不同形状和颜色物料的自动分拣,能够适应实时变化的
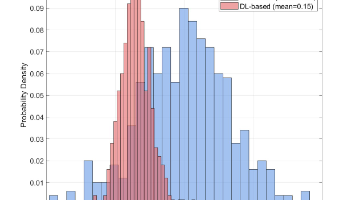
该轻量网络通过精简的网络架构设计和高效的注意力计算方式,在大幅降低模型参数量和计算量的同时,仍然保持了与先进方法相当的识别性能,成功实现了识别精度与计算效率之间的有效平衡。更为关键的问题是,当实际应用场景中的信号数据分布特征与训练数据存在差异时,已经训练好的网络模型可能出现严重的性能退化,这一现象被称为域偏移问题。本研究设计了专门的域自适应训练策略,在保留源域判别性特征的同时,学习源域与目标域之间