- @hbsyaaa
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了二级指针在C语言中的使用场景,重点通过解析JSON文件的示例进行说明。首先回顾了一级指针的用法,指出当需要通过函数参数传递指针类型数据时,需要使用二级指针。文章提供了两个具体示例:第一个示例展示了直接在main函数中读取和解析JSON文件;第二个示例将JSON解析封装成函数,通过二级指针参数返回解析结果。最后提出进一步封装的需求,即通过比较两个JSON文件的版本号,返回版本更高的JSON
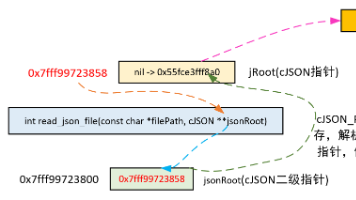
本文介绍了二级指针在C语言中的使用场景,重点通过解析JSON文件的示例进行说明。首先回顾了一级指针的用法,指出当需要通过函数参数传递指针类型数据时,需要使用二级指针。文章提供了两个具体示例:第一个示例展示了直接在main函数中读取和解析JSON文件;第二个示例将JSON解析封装成函数,通过二级指针参数返回解析结果。最后提出进一步封装的需求,即通过比较两个JSON文件的版本号,返回版本更高的JSON
TCP/IP含义从字面意义上讲,有人可能会认为TCP/IP是指TCP与IP两种协议。实际生活当中有时也确实就是指这两种协议。然而在很多情况下,它只是利用IP进行通信时所必须用到的协议群的统称。具体来说,IP或ICMP、TCP或UDP、TELNET或FTP、以及HTTP等都属于TCP/IP的协议。它们与TCP或IP的关系紧密,是互联网必不可少的组成部分。TCP/IP一词泛指这些协议,因此,有时也称T
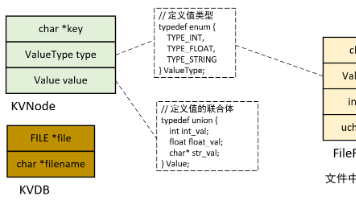
本文介绍了一种简易数据库的实现方法,适用于嵌入式系统等资源受限环境。该数据库采用key-value存储模式,支持整型、浮点型和字符串三种数据类型。数据库以二进制文件形式存储数据,每条记录包含键名、值类型、值长度和值数据。文章详细讲解了数据库的数据结构设计,包括ValueType枚举、Value联合体和KVNode键值对结构,并提供了完整的C语言实现代码,包含打开/关闭数据库、插入/更新、查询、删除
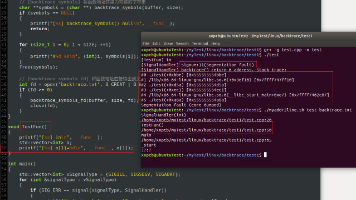
摘要:利用backtrace定位嵌入式Linux程序崩溃问题 在嵌入式Linux开发中,多人协作时定位代码崩溃点往往困难。本文介绍使用backtrace工具快速定位崩溃位置的方法。当程序崩溃触发SIGSEGV等信号时,通过signal捕获信号并在handler中调用backtrace获取调用栈信息,配合addr2line工具将地址转换为可读的函数名和行号。关键步骤包括:编译时添加-g调试选项,使用
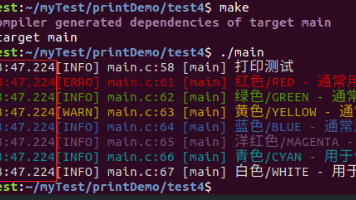
本文介绍了在嵌入式Linux开发中优化日志打印的方法,通过添加颜色、等级标识等额外信息提高调试效率。首先解释了终端颜色控制原理(如"\033[31m"表示红色),并给出了基础颜色打印示例。然后展示了通过宏定义封装不同颜色等级的打印函数(如ERROR用红色,WARNING用黄色)。文中还详细说明了可变参数宏##__VA_ARGS__的作用,以及如何避免空参数导致的语法错误。最后提
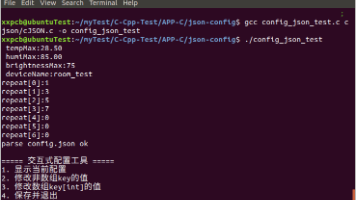
本文介绍了使用C语言读写JSON配置文件的方法,重点演示了如何解析和修改配置数据。通过cJSON库实现文件读取、数据解析和类型判断,支持整数、浮点数、字符串和数组等常见数据类型的处理。文章详细展示了配置文件的定义、加载解析流程、数据打印以及基于类型的字段修改功能,为嵌入式系统等场景下的配置文件管理提供了实用解决方案。
一般需要数据处理时我们会使用excel表格,并可使用其自带的求和、排序等功能对数据进行处理,但对于某些复杂的处理,我们可以使用python工具来读取excel数据,并通过python编程,来实现自己所需要的数据处理结果和数据保存方式。下面以一组学生成绩数据为例,计算每行的总分和平均分,并将最终结果连同学号保存到新的excel中,最终效果如下,左边是原始数据excel文件,右边为数据处理后生成的ex
本篇介绍了软件测试的相关基础知识,包括静态测试与动态测试、测试策略、测试阶段、白盒测试与黑盒测试等。下篇将根据实例,继续介绍白盒测试,各种语句覆盖的实操设计。
本篇来介绍一款具有AI计算能力的Linux开发板:OK3568-C。