




- @Johnor
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
最近使用使用vscode连接wsl2写python时,经常遇到找不到包中的方法的问题,最终发现vscode在执行python代码时目录不是从当前python文件开始算起,而是从当前工作区的目录开始算起,比如说我打开的是/home/lenovo/code,在我的code目录下有一个py_learn文件夹下有geometry.pymain.py 两个文件。这样每次执行py程序就会从当前的py文件的目录

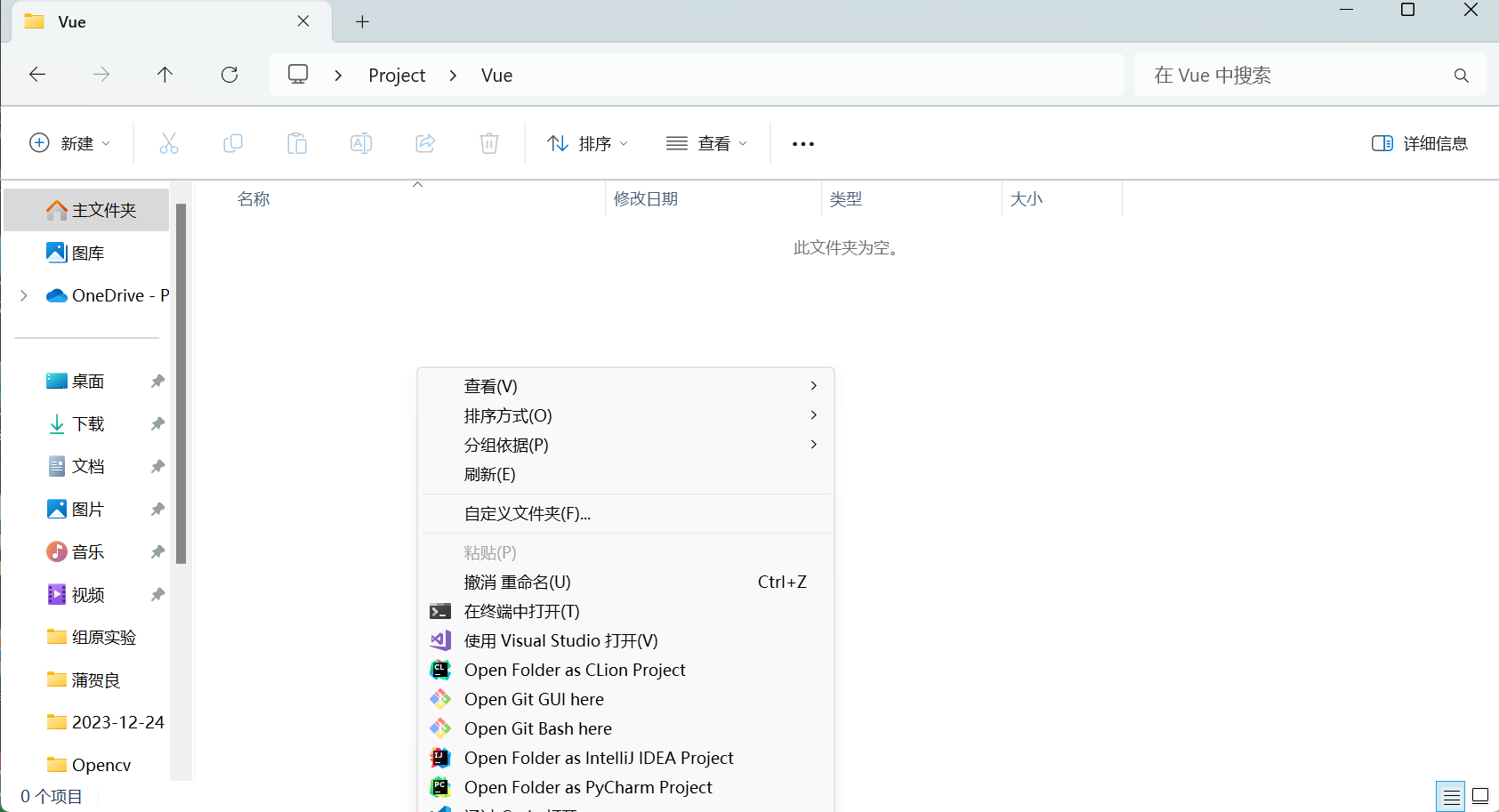
很多时候我们很多项目都需要使用vscode来进行编写代码,像我个人会拿vscode写python,linux远程写代码,前端和stm32的编辑器,这些项目都有自己的插件,如果我们启动某一个项目,其他的与本项目无关的插件也启动了,这就会非常占用我们的内存,下面提供一种根据项目分不同工作区的方式。在目标出添加“文件夹绝对路径”,记得在的位置后要先添加一个空格,我这里有两个图标。在拓展中点击禁用(工作区
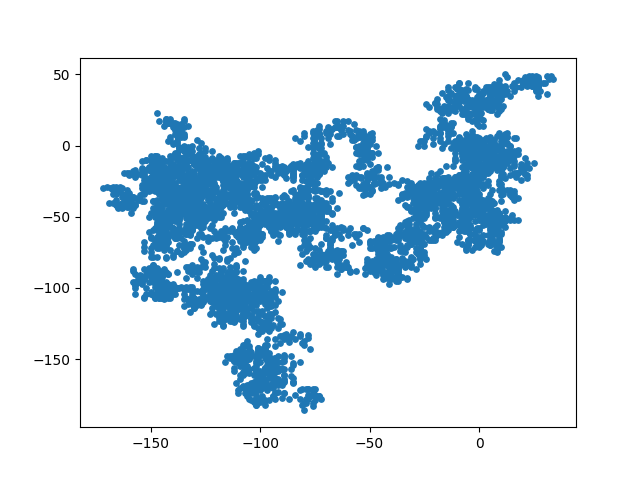
Python画图
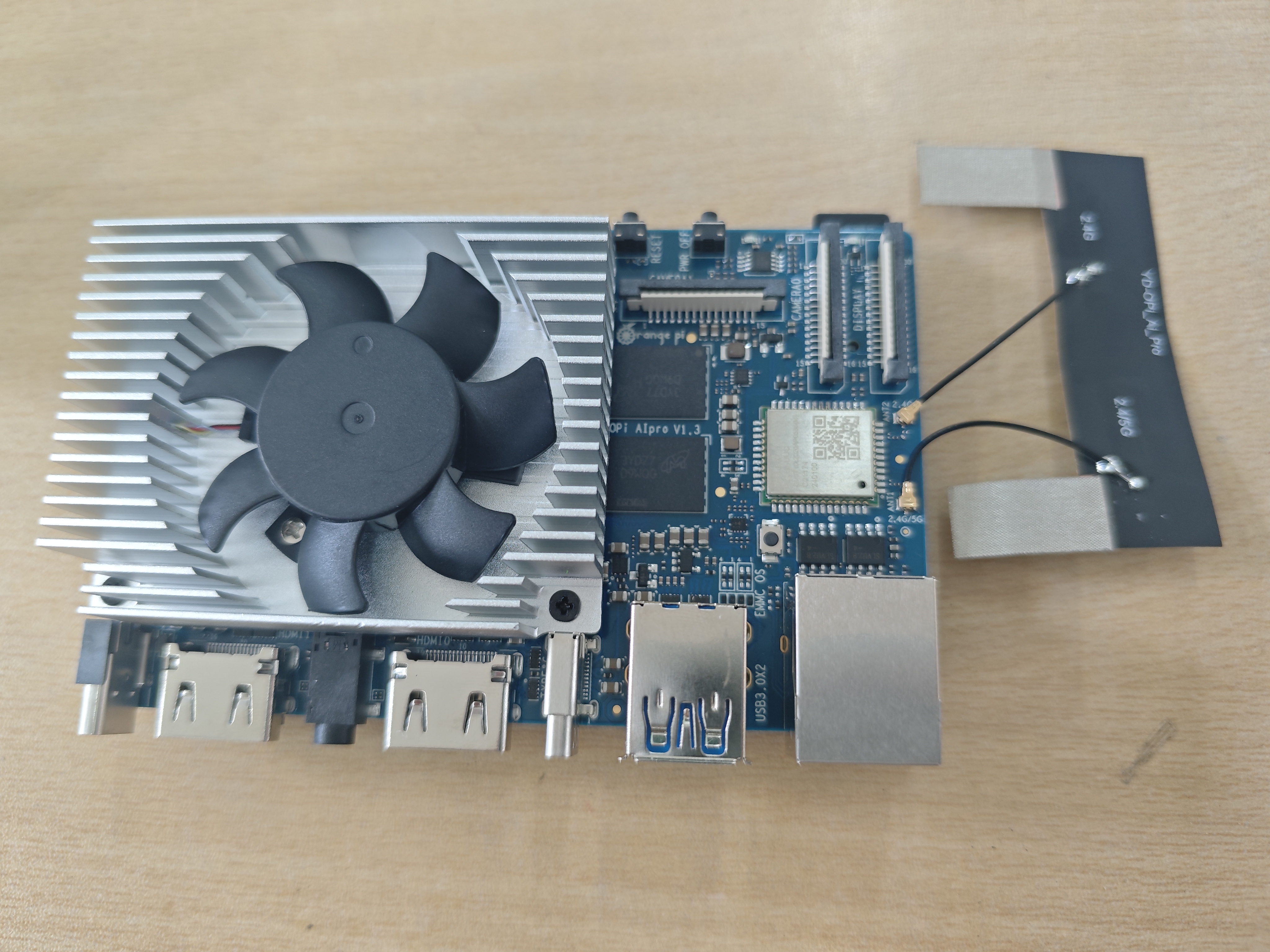
话不多说先放两张Orange Pi AIpro的全身照,可以看到板子还是很漂亮的。Atlas 200计算模块作为开发板的CPU与NPU。模块集成了Ascend 310处理器,可以高效地高效能低功耗: 昇腾310采用7nm工艺制造,拥有高效的能耗比,能够在提供强大计算能力的同时保持较低的功耗,非常适合嵌入式和边缘计算应用。强大计算能力。
VSCODE是一款广受好评的代码编辑器,KEIL是常用的嵌入式开发工具但编程界面简陋。将两个工具一起搭配使用, 能大大提高我们的效率。你可以把VSCODE专门用来编辑和编译,KEIL用来对文件进行增删下载配置环境。原始的 KEIL 代码编辑界面在编辑和阅读上都十分的不方便, 只要你用过VSCODE的编辑界面就再也不想回去使用 KEIL 的代码编辑界面了。如下是同一份代码在KEIL和VSCODE上呈

可以关注我的博客查找相关资料。: 如果你想在新的虚拟环境中使用与旧环境相同的包,可以将已安装的包列表导出并在新环境中导入。现在,你已经成功将虚拟环境中的Python版本更改为Python 3.6,并且可以在新环境中使用该版本的Python。不同环境下的python版本和包是独立的,好处是可以在系统中安装多个版本的python和多个版本的包。: 首先,创建一个新的虚拟环境,使用你希望的Python版

话不多说先放两张Orange Pi AIpro的全身照,可以看到板子还是很漂亮的。Atlas 200计算模块作为开发板的CPU与NPU。模块集成了Ascend 310处理器,可以高效地高效能低功耗: 昇腾310采用7nm工艺制造,拥有高效的能耗比,能够在提供强大计算能力的同时保持较低的功耗,非常适合嵌入式和边缘计算应用。强大计算能力。
最终,函数返回一个包含重新排列后的四个角点的数组 myPointsNew,这样你就可以使用这些点来进行后续的操作,如透视变换。将输入的 myPoints 数组重新排列为一个 4x2 的数组,其中每一行包含一个点的x和y坐标。计算每个点的x和y坐标之差,以确定左下角和右上角的点。diff 数组包含了这些差值。计算每个点的x和y坐标之和,以确定左上角和右下角的点。add数组包含了这些和值。通过找到差值

为了配合旭日派X3的ros2-foxy系统,担心之前安装的humble系统与foxy不兼容,于是重新开了一个Ubuntu20.04的虚拟机环境是ubuntu20.04 使用阿里源。

VSCODE是一款广受好评的代码编辑器,KEIL是常用的嵌入式开发工具但编程界面简陋。将两个工具一起搭配使用, 能大大提高我们的效率。你可以把VSCODE专门用来编辑和编译,KEIL用来对文件进行增删下载配置环境。原始的 KEIL 代码编辑界面在编辑和阅读上都十分的不方便, 只要你用过VSCODE的编辑界面就再也不想回去使用 KEIL 的代码编辑界面了。如下是同一份代码在KEIL和VSCODE上呈