




- @BoilingHotPot
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务

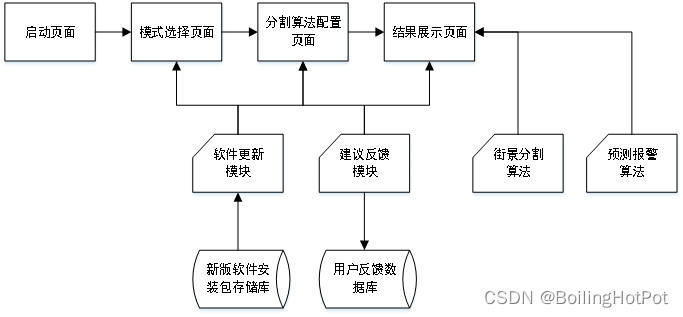
由启动页面自动转跳至如图3所示的第二个界面后,可以看到主界面上显示的是两个模式的选择,分别是步行模式和驾驶模式。在该页面的侧边有着一个菜单栏,其如图10所示,其中包括了反馈系统和检查更新,反馈系统可以上传意见和使用体验,在未来我们会增加更多的功能,比如错误的截屏反馈,能够更好的帮助我们优化算法,提高识别的准确率。点击相应的模式后进入如图4的分割算法配置页面,可以看到若干选项,这些选项主要针对日常行
人工智能的一些创新点,经过验证后效果不佳。可以借鉴后修改并发表论文,也可以提前避坑

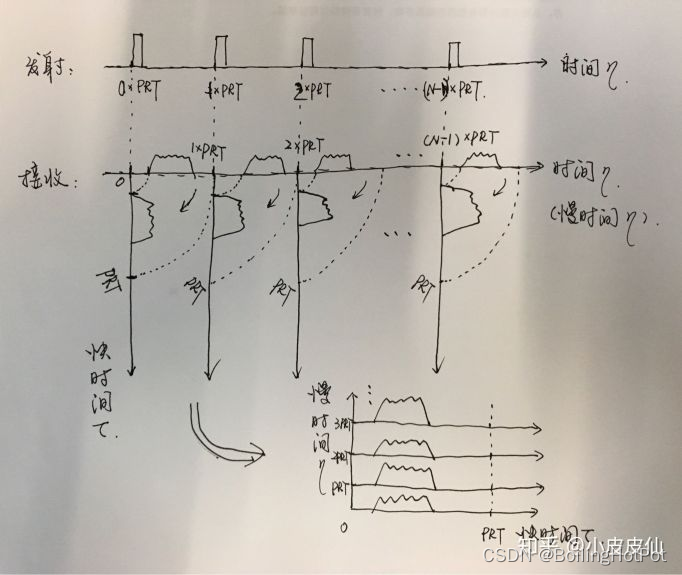
Loran-C接收信号处理中,完成信号的捕获后需要进行信号的跟踪,Loran-C信号的跟踪按照信号处理流程分为天地波识别、周期识别和正向过零点跟踪三个步骤。Loran-C信号通过天波和地波两种方式到达接收点,导致接收到信号为地波和天波的合成信号,而实际到达时间测量是通过测量地波信号的到达时间实现的,这就需要从接收合成信号中提取地波信号,这个过程称为天地波识别,也是信号跟踪主要的环节。本文主要经典的

人工智能的一些创新点,经过验证后效果不佳。可以借鉴后修改并发表论文,也可以提前避坑
本项目实现了基于PyTorch Lightning的神经网络训练和测试管道。项目除了实现PyTorch Lightning的工作流外,还实现了通过任务池在训练过程中添加任务、k折交叉验证、将训练结果保存在.cvs中、接受随机种子进行恢复训练、将模型转换为.onnx和.tflite。项目地址: https://github.com/shenyan233/machine_learning_templa

