




- @BIT_Legend
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
densenet网络是CVPR 2017 (Best Paper Award),这篇论文是在Stochastic Depth的启发下提出的。densenet和Stochastic Depth都是清华的黄高博士提出的。DenseNet(密集卷积网络)的核心思想是密集连接,即某层的输入除了包含前一层的输出外还包含前面所有层的输出。
这是一篇跟着官方教程走的深入文章,官方教程有6篇。
访问完右分支后,退回到最初根节点的上一级节点,再访问右分支。迭代法的思路其实是以层作为粒度,弹出一层的所有节点,然后放进去下面一层的所有节点,这里需要在注意的是在 que 中我们是无法区分两个节点是否来自于同一层的,所以在编程时,需要实现获取一层的长度。递归法就是函数在函数实现中调用函数本身,但函数实现中还需要增加调用终止条件,在函数实现中可以先假定函数已经实现,所以在考虑一个根节点和两个子节点时
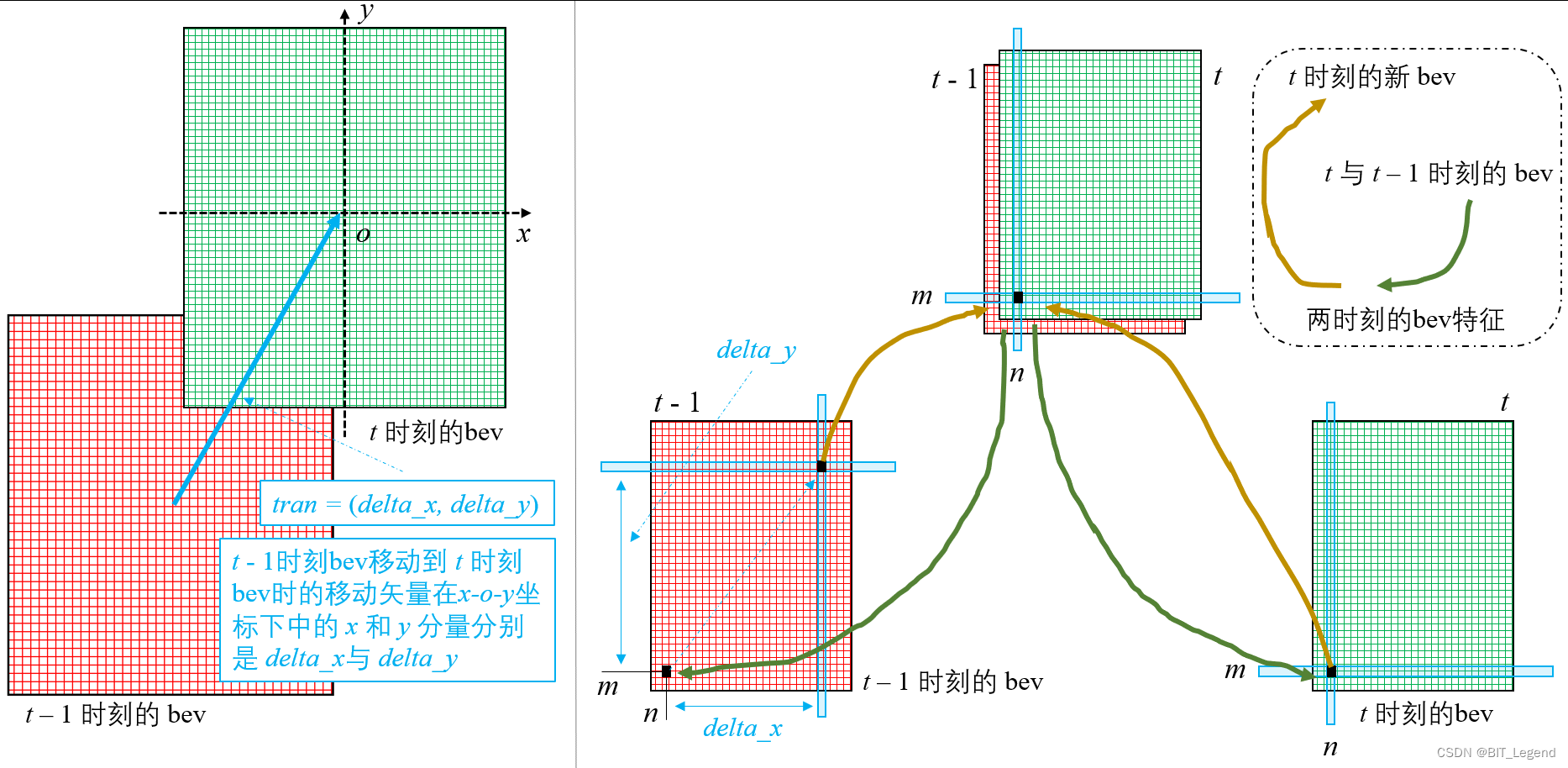
当前在自动驾驶感知领域,最流行的算法就是基于bev原理的检测算法,其中基于bev目标检测的典型算法是bevformer,基于bev建图的典型算法是maptr。为了提升模型性能,两者均使用了完全相同的bev时序对齐模块以实现bev时序检测。其bev时序对齐模块的原理比较难懂,本文主要对bev时序对齐模块的原理进行解释,并基于发现的问题做出了改进,同时附上了具体实现代码。
# 根据torch官方代码修改的shufflenetv2的网络模型 https://github.com/pytorch/vision/blob/main/torchvision/models/shufflenetv2.py# 权重文件下载 download url: https://download.pytorch.org/models/shufflenetv2_x0.5-f707e7126e.

ConvNext是在ResNet50模型的基础上,仿照Swin Transformer的结构进行改进而得到的纯卷积模型,当然原生模型是一个分类模型,但是其可以作为backbone被应用到任何其它模型中。ConvNext模型可以被称之为2022年cv算法工程师抄作业必备手册,手把手教你改模型,把ResNet50从76.1一步步干到82.0。
Deep Layer Aggregation (DLA) 是一种网络特征融合方法,发表于CVPR 2018。相比传统串联的卷积网络,其典型特点是实现了不同层级的深度融合,相比目标检测中的FPN和PAN结构,相比Desnet的密集连接,其连接方式更复杂更综合。论文中包含两个网络,一个是DLA的特征提取模型,可用作分类模型和检测模型的backbone,第二个网络是在DLA的基础上加入一个decoder
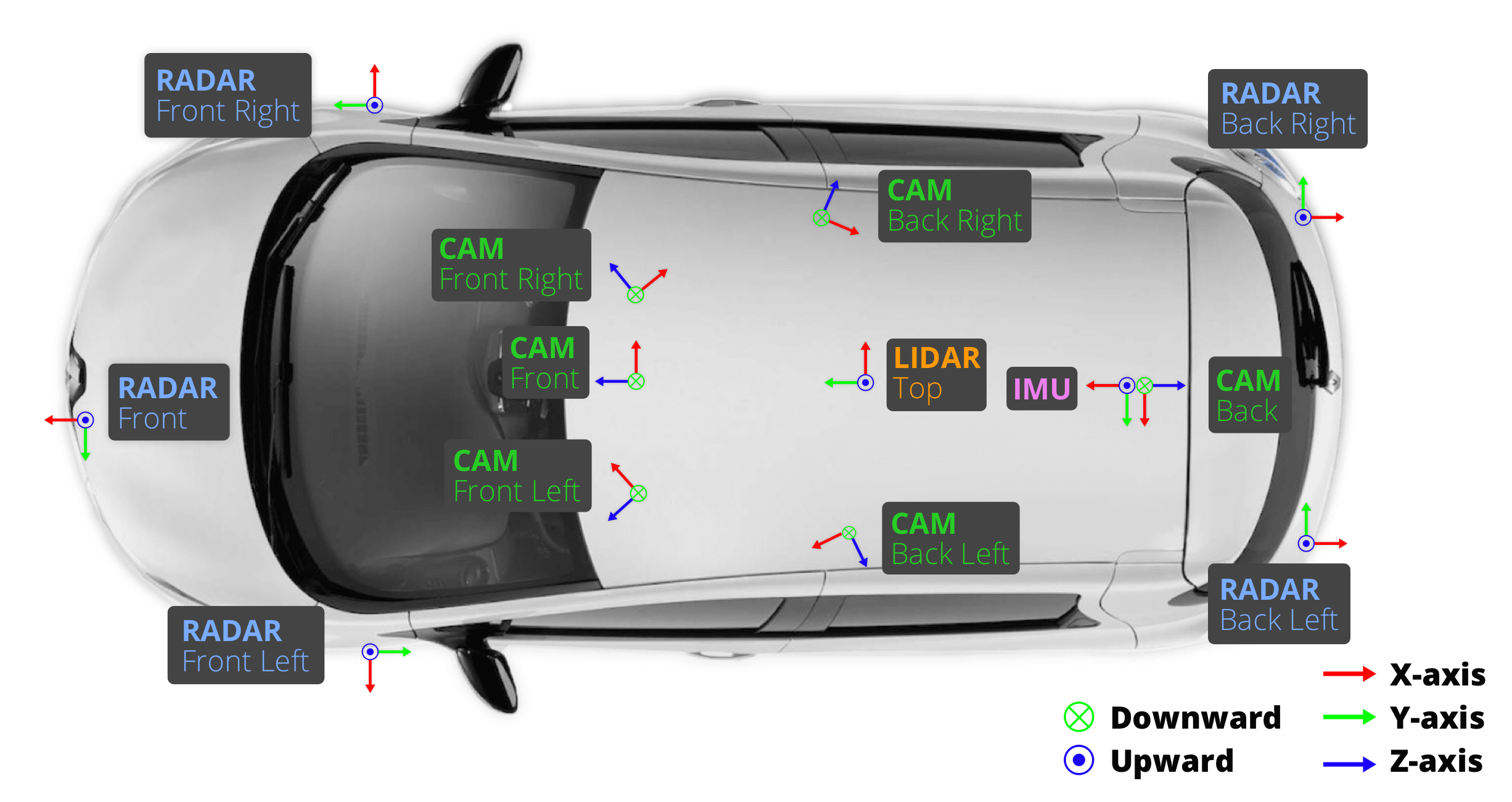
在无人驾驶中存在多种传感器,例如相机camera,激光雷达lidar,毫米波雷达radar等。在每个传感器中都有自己的坐标系,所以在无人驾驶中存在诸多的坐标系转换问题。本文将会基于nusenes数据集介绍一下世界坐标系,自车坐标系,相机坐标系,像素坐标系,激光雷达坐标系,毫米波雷达坐标系,IMU坐标系,以及最近在无人驾驶领域最流行的bev检测方案中的bev坐标系和bev像素坐标系,之后会说明一下n
CenterNet是一种基于free-anchor的目标检测模型,其继承自CornerNet目标检测模型,可以很容易迁移到例如3D目标检测和人体关键点检测等任务。CenterFusion是一种通过融合毫米波雷达数据和可见光相机数据进行3D目标检测模型,该模型属于中端融合模型..........................................

为了理解mmcv中的模块导入过程,首先需要理解python中的相对路径/绝对路径,以及__init__.py文件在import中的作用,然后再学习mmcv关于Register类和build的相关知识。