- @2501_90314346
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
DeepSeekai文游指令300➕最新最全古代、哨向、现代、西幻、诡异、修仙、系统穿越、末日生存、复仇重生、现代校园、后宫宅斗、斗罗大陆、………(板块特别多写不过来啦)
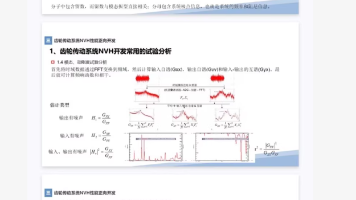
新能源高速齿轮传动系统NVH开发、仿真及测试电子资料
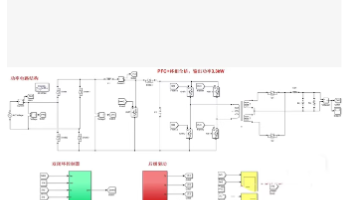
新能源汽车,车载充电机仿真模型(基于PWM整流器)。输出功率3.3kw,前级PFC采用双闭环控制,
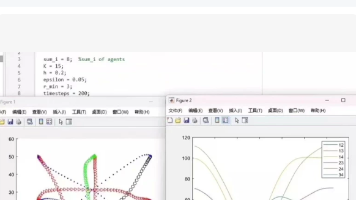
(文献+程序)多智能体分布式模型预测控制 编队 队形变换论文复现带文档MATLAB MPC 无人车无人机编队无人船无人艇控制编队控制强化学习嵌入式应用simulink仿真验证 PID 智能体数量变化
基于python深度学习垃圾图像分类识别系统关键模型:VGG19➕DenseNet121➕ResNeXt101包含内容:数据集➕ppt➕文档➕代码
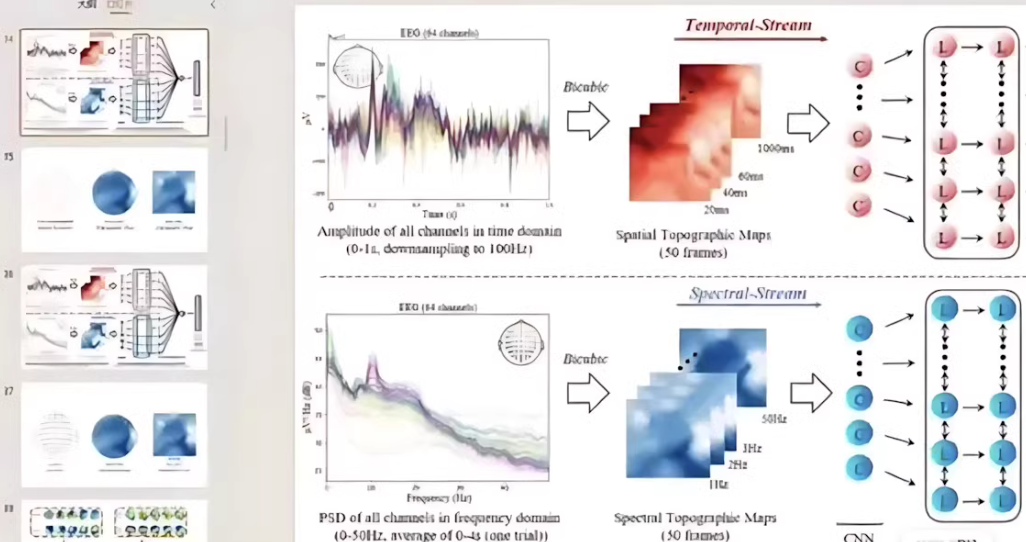
神经网络模型PPT绘图模板,深度学习画图。由PPT绘制的神经网络模型架构图,累计页数200+,包含但不限于LSTM、CNN、RNN、BiLSTM、BiLSTM-attention、Transformer等神经网络模型,每一元素均可以直接编辑。适用于从事深度学习相关领域的模型结构图绘制,模型结构不仅美观且元素相对独立可直接剪切、编辑。
基于Matlab深度学习手写字体识别检测系统GUI这款MATLAB手写字体识别与处理系统GUI软件基于深度学习卷积神经网络,专用于手写字体的识别与处理。用户可以选择需要识别的手写字体,系统将显示识别结果及其置信率。软件界面采用白色设计,配有直观的曲线图显示,便于用户理解和分析识别效果。适用于学术研究、数据分析及机器学习领域。主要功能:深度学习:使用先进的卷积神经网络技术进行手写字体识别,提高识别精

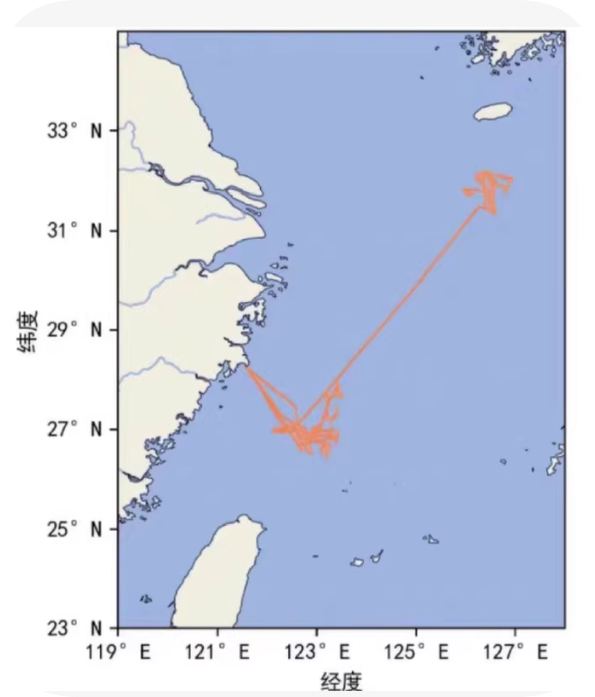
ros开发 船舶轨迹预测 ros无人船/无人艇协同避障;水下机器人rov建模多智能体协同控制;无人船,无人艇的路径规划算法;编队控制;船舶轨迹跟踪自适应滑模控制;无人潜水艇/无人船轨迹跟踪、自动靠泊、路径规划、无人船自动驾驶;基于模型预测控制的无人艇分布式编队协同控制;无人船/艇编队协同控制,无人船编队;MPC无人船模型预测控制;模型预测控制多智能体协同控制致性;Matlab/simulink仿真
Python-基于深度学习的人脸识别与管理系统(UI界面整强版Python代码)Python版本3.8功能:系统实现了集识别人脸、录入人脸、管理人脸在内的多项功能:包括通过选择人脸图片、视频、摄像头进行已录入人脸的实时识别;可通过图片和摄像头检测人脸并录入新的人脸;通过系统管理和更新人脸数据等功能,检测速度快、识别精度较高。①选择人脸照片识别。②选择人脸视频识别。③摄像头检测人脸识别。④录入人脸功
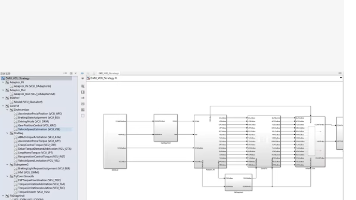
VCU整车控制器模型 MATLAB simulink模型功能模块如下:输入信号处理输出信号处理加速踏板制动踏板档位控制制动灯请求判断