- @2301_77717128
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
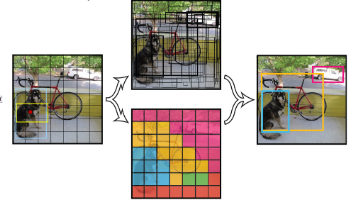
YOLOv1是首个单阶段目标检测算法,将图像划分为7×7网格,每个网格预测2个边界框及其置信度和20类概率。采用24层卷积网络和端到端设计,损失函数综合位置、置信度和分类误差。通过非极大值抑制(NMS)消除冗余检测框,保留最高置信度结果。其优势在于速度快、架构简单,但存在小目标检测效果差、网格单类别预测限制等不足。尽管存在局限,YOLOv1开创性的设计思想对目标检测领域发展产生深远影响。
本文介绍了矿物数据清洗的完整流程与方法。数据清洗通过完整性、全面性、合法性、唯一性检查确保数据质量。针对矿物数据,采用10个步骤进行处理:数据读取筛选、缺失值检查、特征标签分离、标签编码、类型转换、Z标准化、数据集切分、数据填充(提供删除空值、均值/中位数/众数填充、线性回归和随机森林6种方法)、过采样(SMOTE算法)和数据保存。重点阐述了不同填充方法的实现细节,包括按类别计算统计量、基于机器学
OCR(光学字符识别)技术通过计算机视觉和机器学习算法,将图像中的文字转换为可编辑文本。其处理流程包括图像预处理、文字检测、识别和后处理四个阶段。本文详细介绍了基于PaddleOCR的实现方法,涵盖静态图片和实时视频中的中英文识别,特别针对中文显示问题提供了PIL库的解决方案。同时给出了性能优化建议(GPU加速、跳帧处理等)和常见问题解决方法,并探讨了多语言识别、结果保存等扩展应用场景。通过这套方
本文介绍了一个基于卷积神经网络的食物图像分类系统实现过程。主要内容包括:1)数据预处理,通过Python脚本生成训练集和测试集路径文件;2)数据增强策略,采用旋转、裁剪、翻转等9种图像变换方法提升模型泛化能力;3)构建三层CNN网络结构,包含卷积、ReLU激活和池化操作;4)训练流程设计,使用交叉熵损失和Adam优化器进行10轮训练;5)模型保存机制,支持参数状态和完整模型两种保存方式。系统通过P
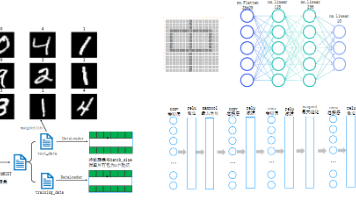
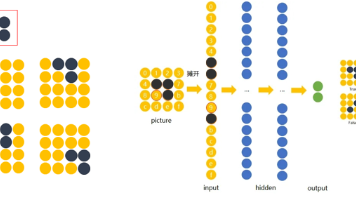
本文系统介绍了卷积神经网络(CNN)的工作原理。首先阐述了图像的数值表示方法,包括灰度图和RGB三通道模型。重点讲解了CNN的核心组件:1)卷积层通过卷积核提取特征,涉及步长、填充等参数;2)池化层实现降采样,包括最大池化和平均池化;3)全连接层完成最终分类。文章还分析了CNN的关键特性如图像不变性、感受野等,并对比了LeNet、AlexNet、VGGNet、ResNet等典型CNN模型的结构特点
自然语言处理是机器学习中让计算机获得“语言智能”的关键领域。从早期的规则系统到如今的大语言模型(LLM),NLP技术已深刻改变我们与机器交互的方式,并广泛应用于搜索引擎、智能助理、内容创作、客户服务等方方面面。它的发展是人工智能向通用智能迈进的重要标志。
摘要: 支持向量机(SVM)是一种监督学习算法,擅长解决小样本、非线性及高维分类问题。其核心思想是寻找最优超平面,最大化分类间隔,并通过核函数处理线性不可分数据。SVM使用+1/-1标签区分类别,采用拉格朗日乘子法优化超平面,引入软间隔和松弛因子处理噪声数据。关键参数包括惩罚因子C和核函数(如线性、多项式、高斯核),需通过交叉验证选择。实际应用中,SVM在小样本上表现优异,但对大规模数据效率低,且
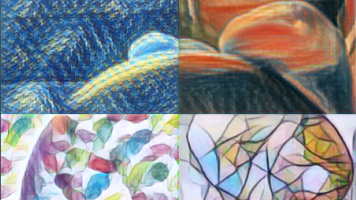
OpenCV DNN模块是用于深度神经网络推理的工具,支持加载TensorFlow、PyTorch等多种框架的预训练模型。核心功能包括图像预处理(blobFromImage)、模型加载(readNet)和前向传播(forward)。模块支持硬件加速,适用于实时计算机视觉任务。典型应用包括图像风格迁移,通过预处理输入、设置网络参数和解析输出结果,可将艺术风格应用于图片或实时视频。还能实现多风格同时处
摘要:本文介绍了常用的图像标注工具(LabelImg、Labelme、VIA等),重点讲解Labelme的安装与使用。安装时需依次执行pip安装命令,若报错可通过修改代码或指定版本解决。使用流程包括:导入图片→创建标注框(支持多种形状)→命名标签→保存为JSON文件。JSON文件包含版本、标签名、坐标、图片尺寸等信息。Labelme支持多种标注类型,保存文件为字典结构的JSON格式,记录了标注的详
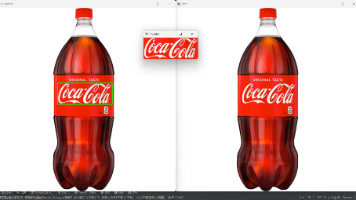
本文介绍了OpenCV中的模板匹配和物体跟踪技术。模板匹配使用cv2.matchTemplate()函数,提供多种匹配方法(如平方差、相关匹配等),通过比较模板图像与目标图像找到最佳匹配位置。物体跟踪则通过创建跟踪器(如CSRT、KCF等)、选择目标区域、初始化并更新跟踪器来实现连续帧中的目标追踪。文章给出了完整的代码示例,包括图像预处理、匹配结果显示和实时摄像头跟踪的实现流程。这两种技术可广泛应