写文章




- @weixin_68811361
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
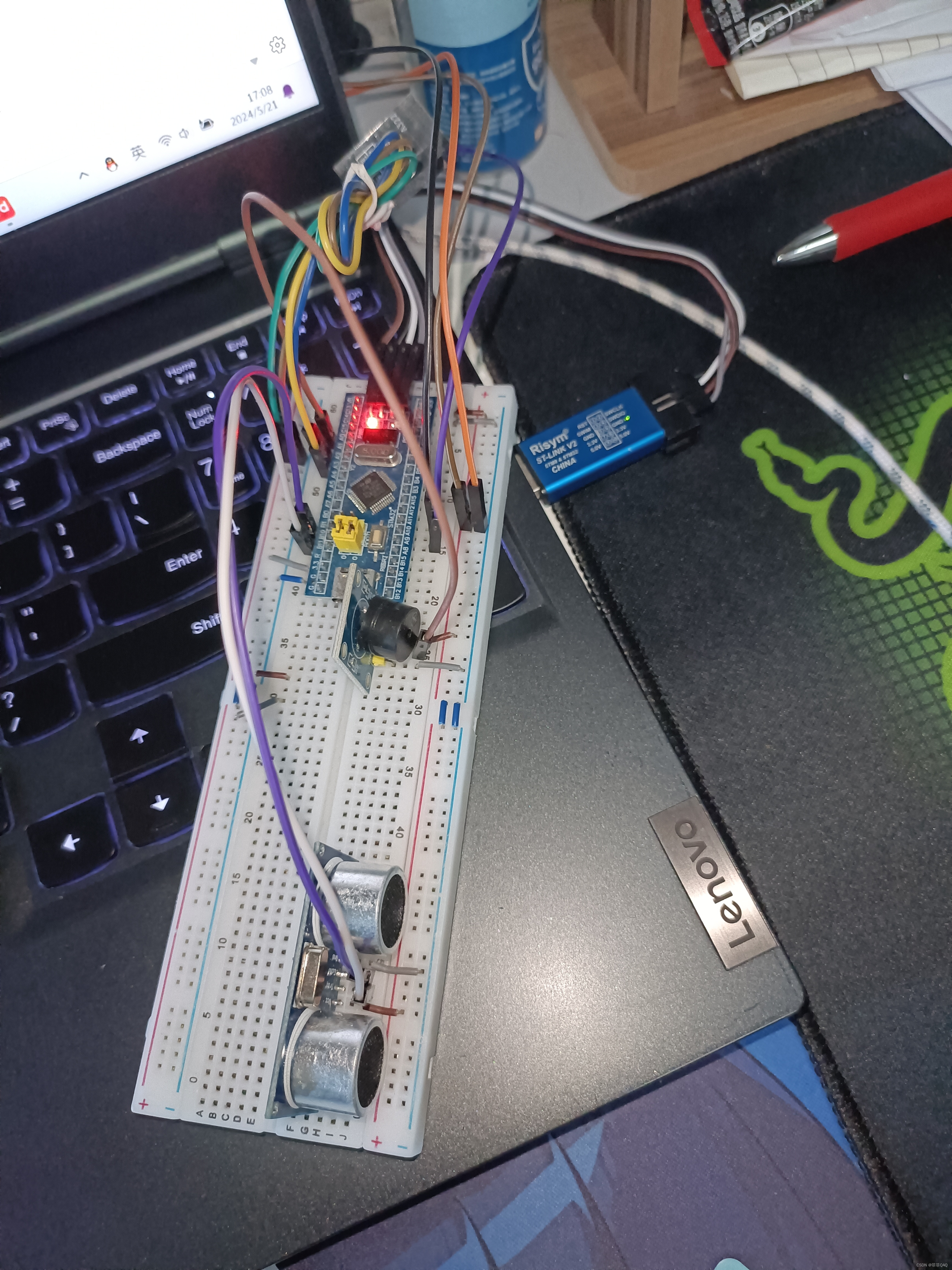
基于STM32的HC-SR04超声波测距(PWM蜂鸣器+滤波算法+数据上云-标准库实现)
基于STM32的HC-SR04超声波测距(滤波算法+数据上云)
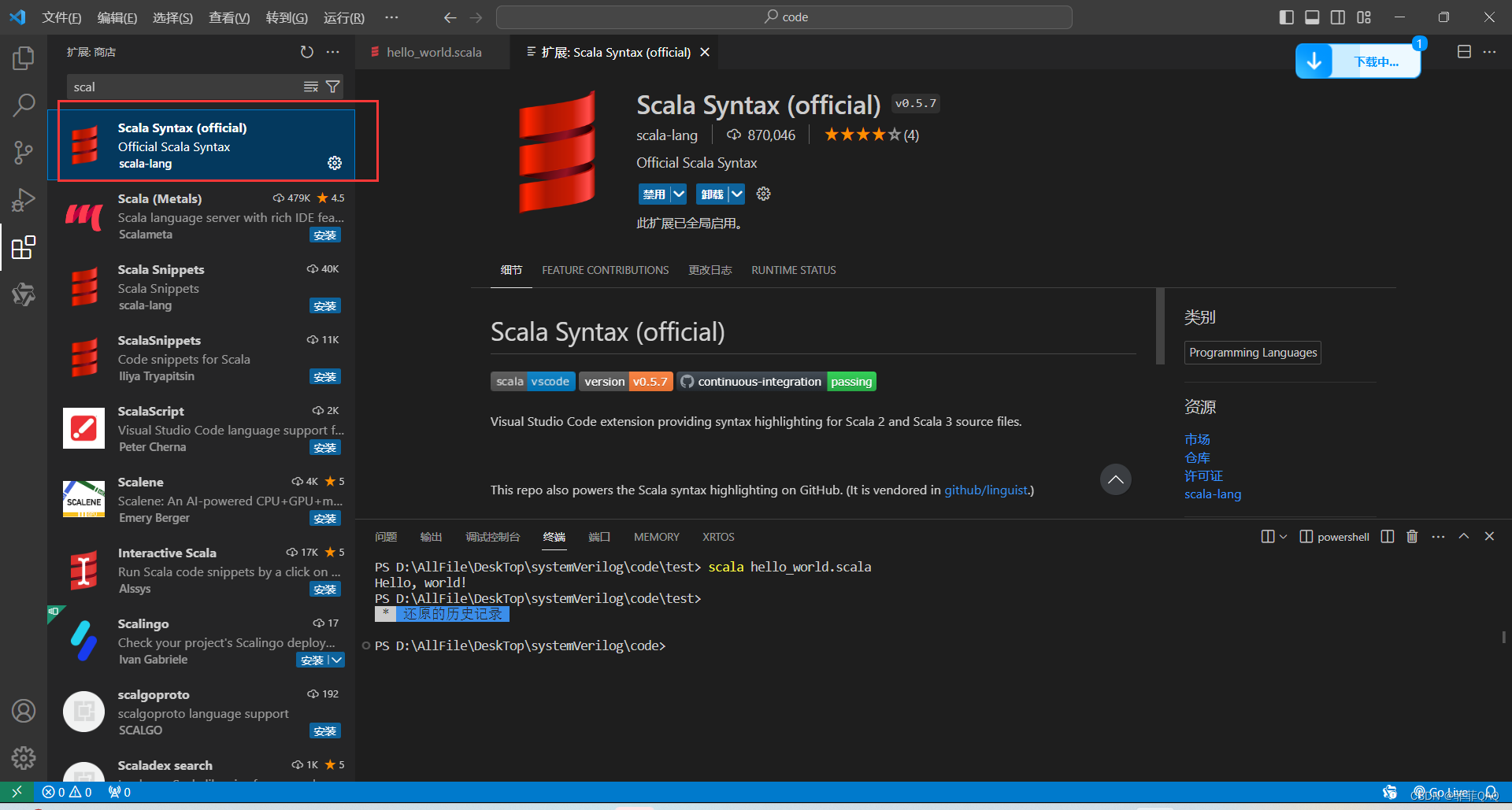
Chisel入门——在windows下vscode搭建|部署Scala2.13.3开发环境|用Chisel点亮FPGA小灯等实验
Chisel入门——在windows下vscode搭建|部署Scala2.13.3开发环境|用Chisel点亮FPGA小灯等实验
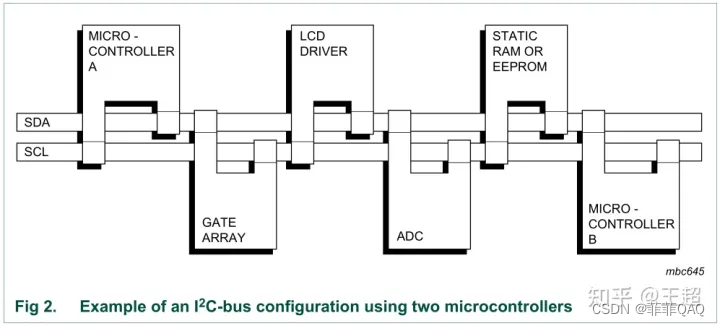
使用STM32F103完成基于I2C协议的AHT20温湿度传感器的数据采集,并将采集的温度-湿度值通过串口输出
本文学习I2C总线通信协议,使用STM32F103完成基于I2C协议的AHT20温湿度传感器的数据采集,并将采集的温度-湿度值通过串口输出。
ROS仿真小车(二)——添加摄像头雷达传感器
ROS仿真小车(二)——添加摄像头雷达传感器
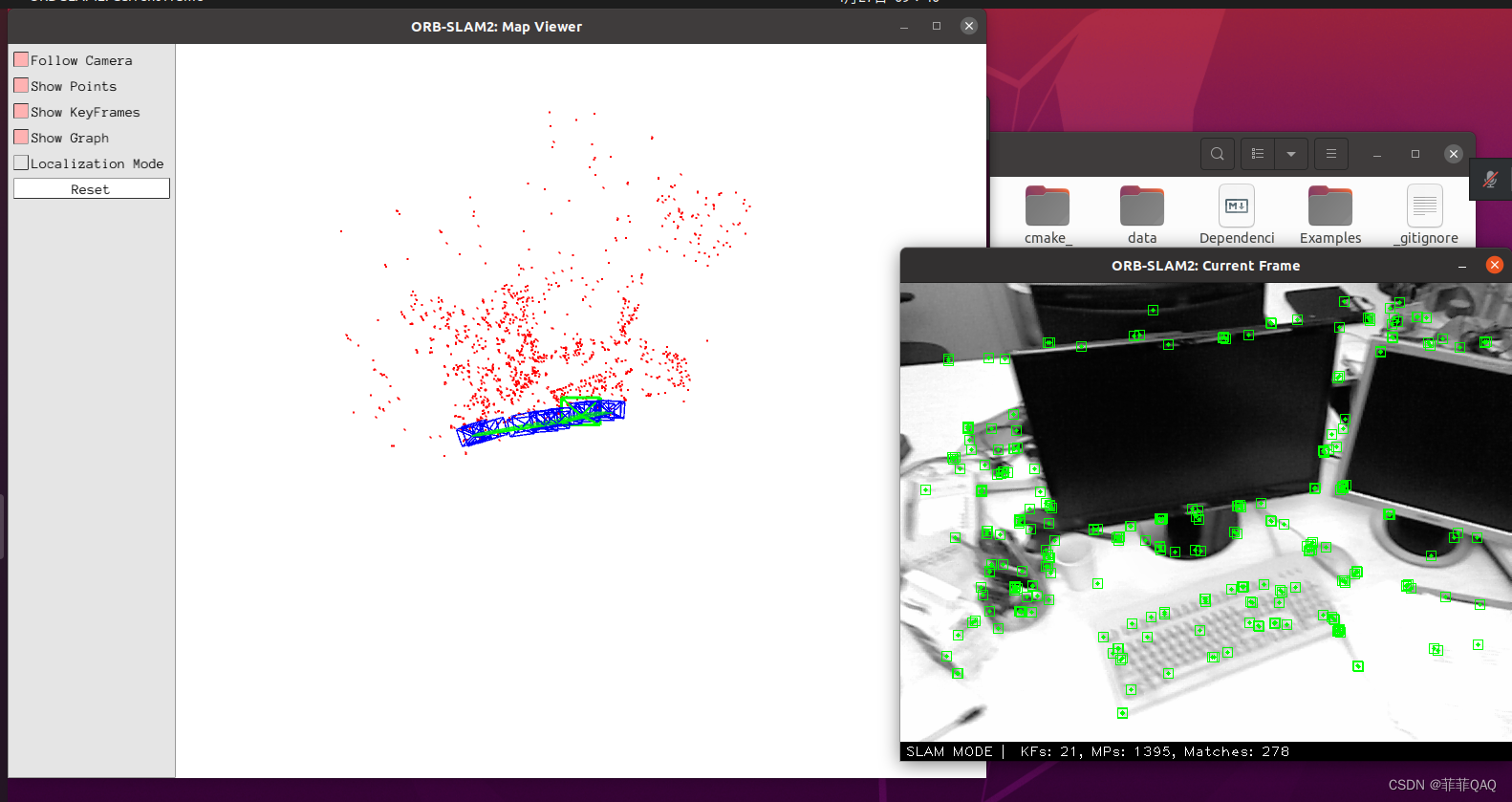
Ubuntu20.04配置ORBSLAM2并在kitti数据集序列进行实验
Ubuntu20.04配置ORBSLAM2并在kitti数据集序列进行实验
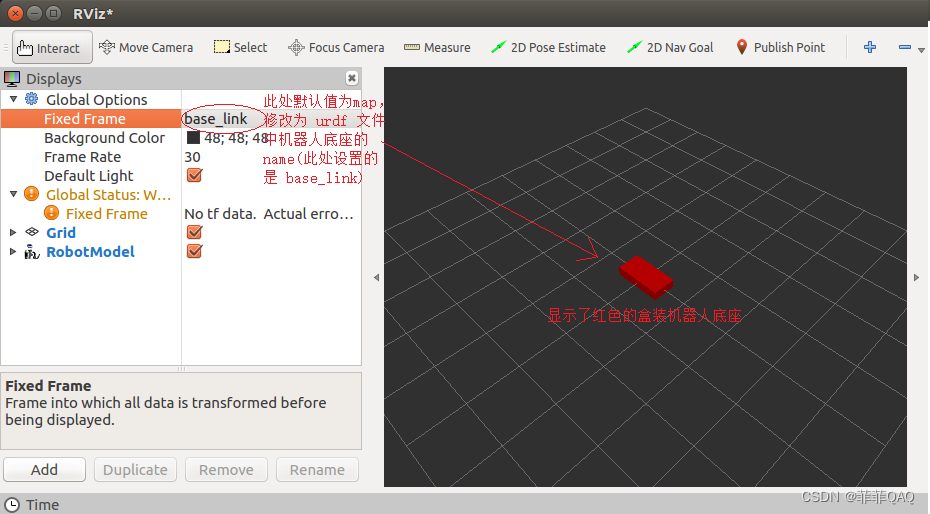
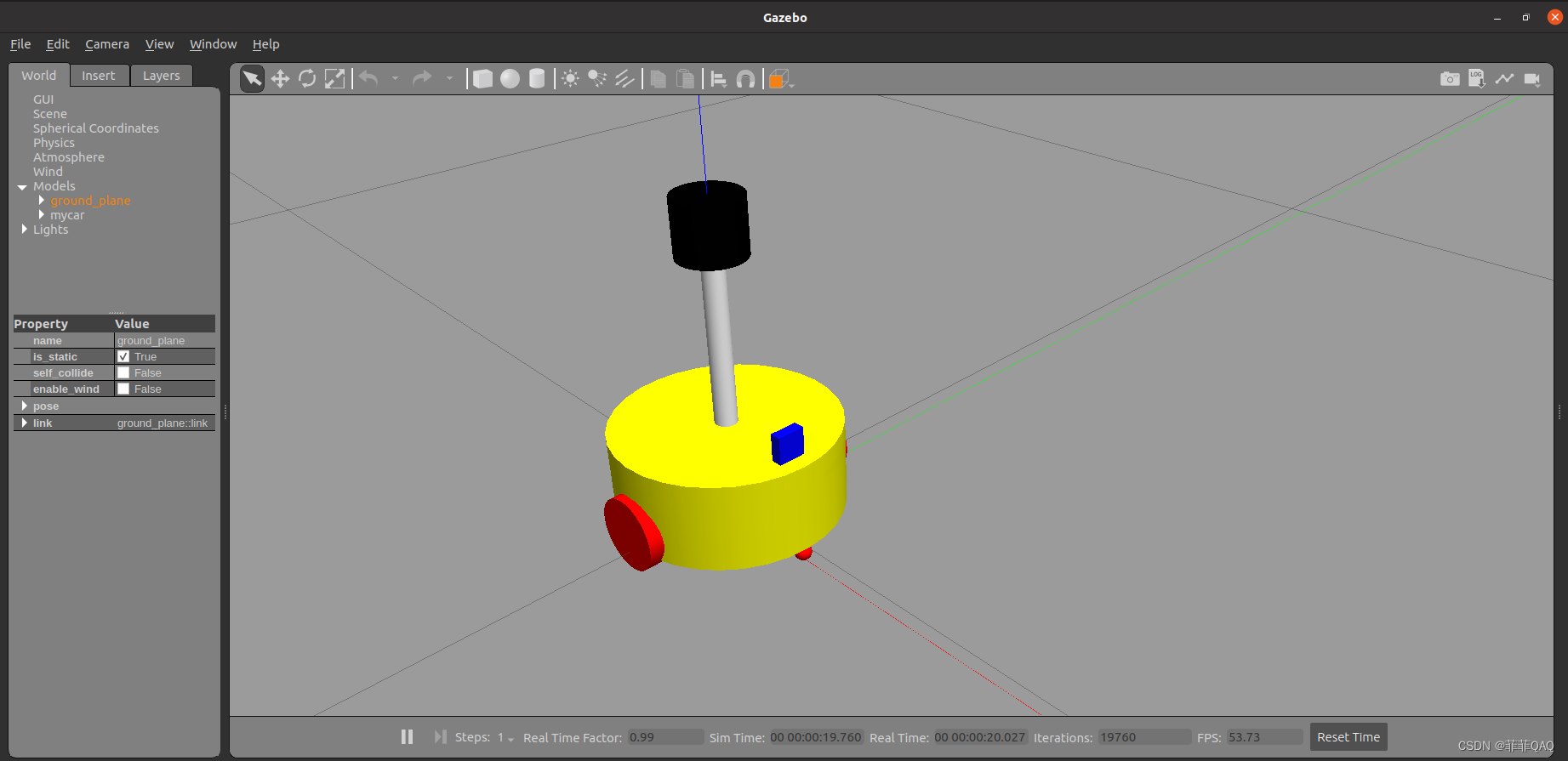
ROS仿真小车(四)—— URDF与Gazebo集成
ROS仿真小车(四)—— URDF与Gazebo集成
Ubuntu18.04安装ROS系统
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。

Ubuntu18.04介绍make工具和Makefile,以及使用makefile编写简单c程序
Ubuntu18.04介绍make工具和Makefile,以及使用makefile编写简单c程序
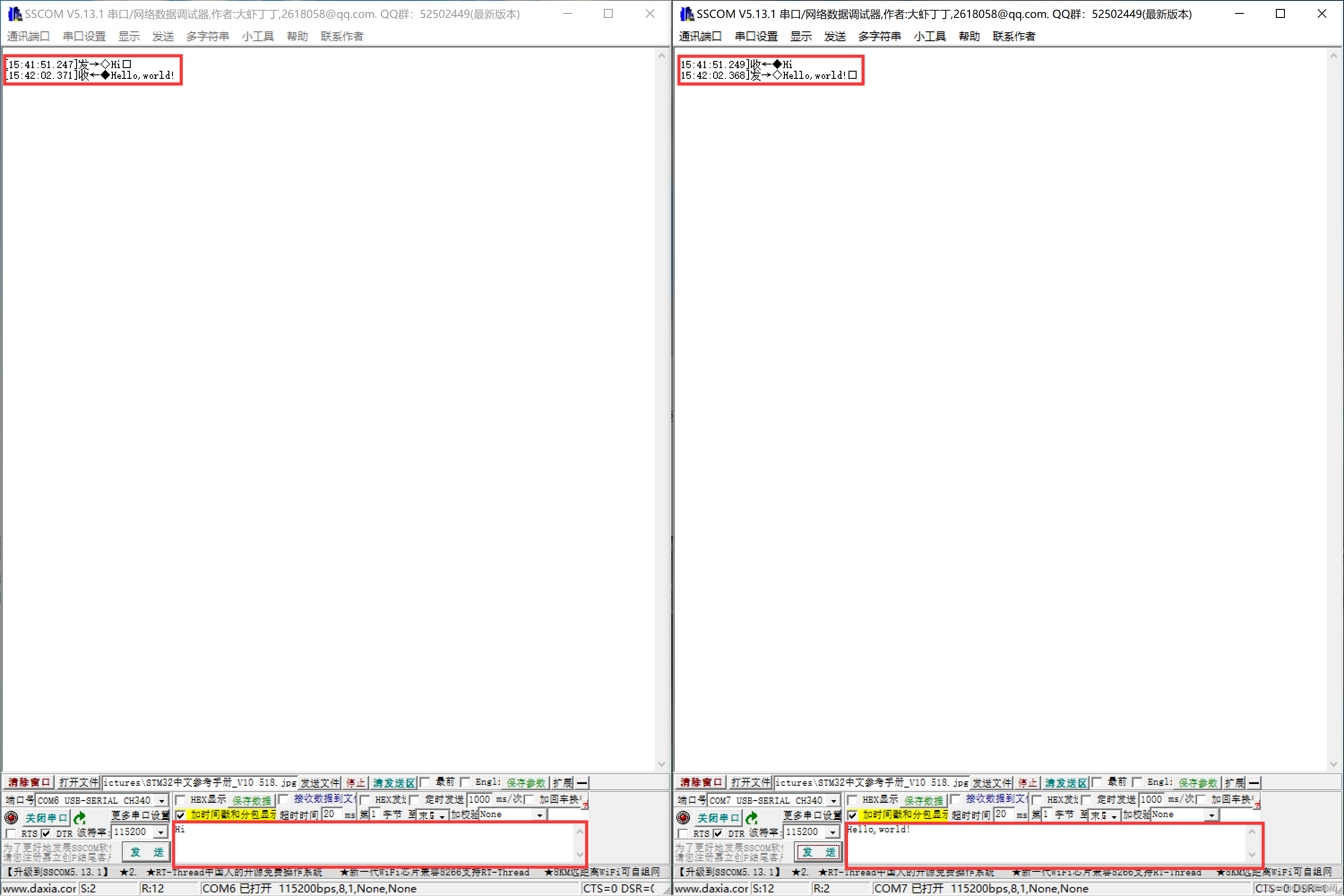
串口连接传输文件
将两台笔记本电脑,借助 usb转rs232 模块和杜邦线,建立起串口连接。然后用串口助手等工具软件(带文件传输功能)将一台笔记本上的一个大文件(图片、视频和压缩包软件)传输到另外一台电脑,预算文件大小、波特率和传输时间三者之间的关系,并对比实际传输时间。
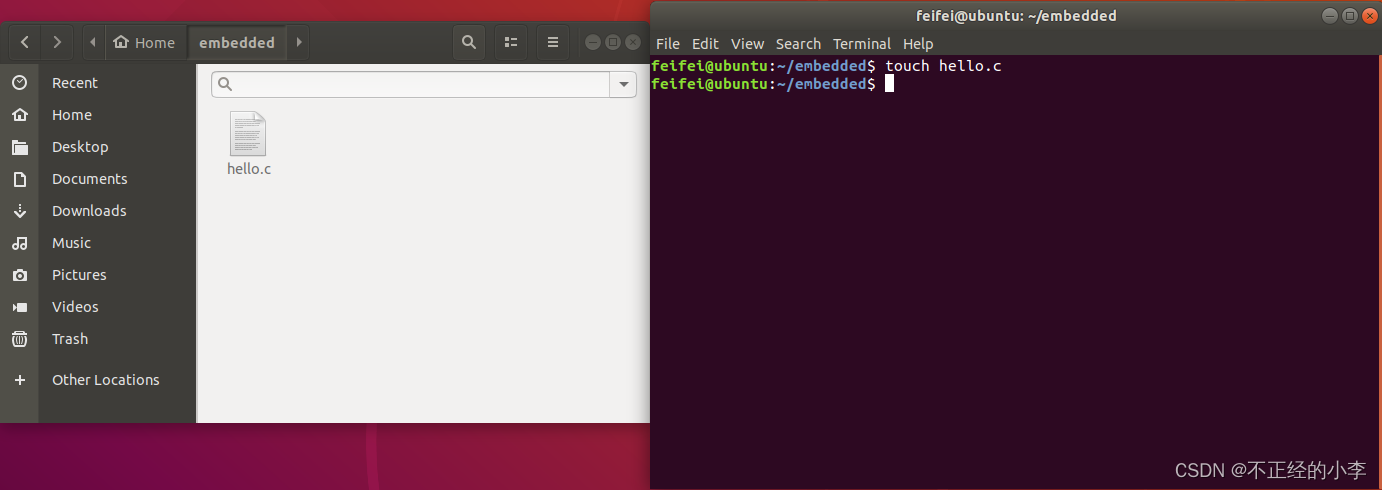
Ubuntu18.04使用gcc编写C语言程序
Ubuntu18.04使用gcc编写C语言程序