- @weixin_50932441
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
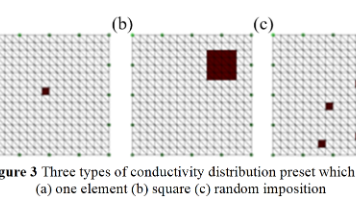
摘要:本研究提出一种基于深度神经网络(DNN)的电阻抗断层成像(EIT)触觉传感器方案,解决传统EIT技术在精度与速度上的矛盾。通过有限元仿真生成训练数据,设计轻量型DNN网络实现快速高精度的导电率分布重建。实验表明,该方法计算时间仅0.002秒,精度接近传统非线性模型,抗噪声能力显著提升。采用导电织物制作的传感器原型具有低成本、易量产特点,可实现50Hz实时触觉感知,为机器人全身触觉提供可行解决
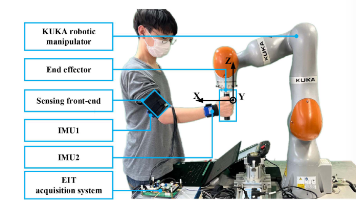
本研究提出一种基于电阻抗断层扫描(EIT)的肌肉骨骼模型,用于实时表征人体手臂运动意图。该技术通过16电极弹性袖套采集肌肉电阻变化信号,结合解剖学模型识别活跃肌肉区域,并利用肌肉骨骼模型将EIT信号转换为腕部运动角度和端点刚度参数。实验表明,模型在单方向运动角度估计准确率超过90%,端点刚度估计误差仅13.85%,能有效实现机器人变导纳控制。相比传统方法,该方案具有可测深层肌肉、训练样本需求少、穿
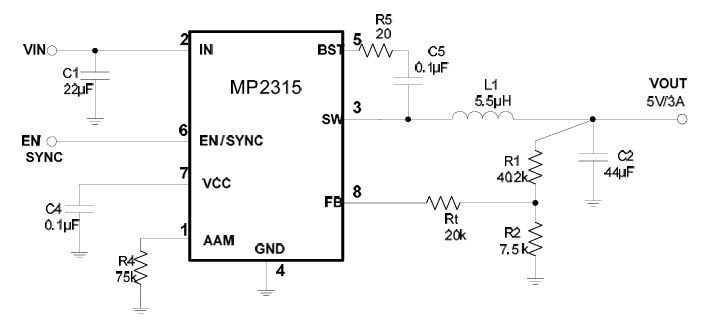
MP2315 是一款内置内部功率 MOSFET 的高频同步整流降压开关模式变换器。可在宽输入范围内实现 3A 的连续输出电流,并具有出色的负载和线路调节能力。MP2315 采用同步工作模式,可在输出电流负载范围内实现更高的效率。电流模式操作提供快速瞬态响应,并简化环路稳定。全面保护功能包括OCP 和热关断。MP2315 最大限度地减少了现有标准外部元器件的使用,采用节省空间的 8 引脚 TSOT2
本文详细介绍了使用卷积神经网络(CNN)进行MNIST手写数字识别的实验过程。首先,文章介绍了MNIST数据集的构成和特点,随后详细描述了CNN模型的架构,包括卷积层、池化层、Dropout层和全连接层的设计。接着,文章阐述了数据预处理、模型训练和保存的步骤,并提供了完整的代码实现。在模型测试部分,文章展示了如何加载预训练模型并对自定义图像进行预测,测试结果表明模型具有较高的准确率和置信度。最后,

本文介绍了一个基于ResNet-34的树叶分类模型训练与测试流程。数据集来自Kaggle竞赛,包含18000张训练集和8000张测试集图片,涵盖176种树叶类别。模型采用ResNet-34架构,加载ImageNet预训练权重,并通过修改全连接层适配多分类任务。训练过程中,使用交叉熵损失函数和Adam优化器,结合学习率动态调整策略,训练30个epoch后,模型在验证集上的准确率达到92.9%。测试阶

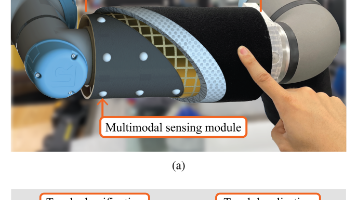
本文提出了一种新型机器人皮肤系统,通过声学超分辨率(ASR)和电阻断层扫描(ERT)两种互补机制实现大面积触觉感知。该皮肤采用多层织物结构,集成多模态传感模块(MSM),能同时检测高频振动(20-1000Hz)和低频压力(0-200Hz)。实验表明,在商用机械臂上部署时,该系统能准确识别9种触摸动作(准确率95.3%),并实现触觉交互。创新点包括:双模态互补感知、一体化硬件设计、工程化适配方案,解
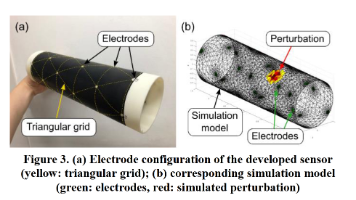
本文提出了一种基于电阻抗断层成像(ERT)的机器人触觉传感器新方法。该传感器采用30个嵌入式电极和碳纳米管导电涂层,通过高导电织物贴片实现压阻特性。研究创新性地采用深度神经网络(DNN)进行图像重建,相比传统正则化方法,DNN能有效补偿非线性行为,使定位误差降低至5.2±3.3mm,灵敏度波动减少14%,并显著提升多点触压情况下的空间分辨率。实验表明,这种结构简单、耐用且可定制的传感器设计,结合D
本文提出了一种新型柔性触觉传感系统,通过多孔泡沫和离子液体的材料组合,结合深度学习算法优化,解决了传统传感器在柔性、分辨率和测力精度上的三大痛点。该系统采用无内部电极设计,实现了20cm×20cm范围内6点同时触摸检测,定位误差仅7.5±4.5mm,力检测误差0.19N。实验验证了其优异的单点和多点触摸识别能力,以及全区域精准测力性能。该方案具有低成本、可量产等优势,为机器人电子皮肤的实用化提供了
摘要:深度学习模型训练涉及多个关键超参数,学习率控制参数更新步伐,需平衡速度与稳定性;批次大小影响计算效率与泛化能力;迭代次数需适中避免欠/过拟合;优化器类型决定参数更新方式;正则化防止过拟合;激活函数引入非线性;学习率调度动态调整训练效率。这些参数需协同优化,根据任务特点选择合适组合,才能实现模型高效收敛与良好泛化。
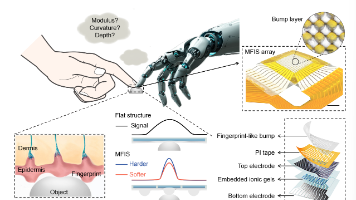
摘要:本文介绍了一种新型仿生触觉传感器MFIS,通过模拟人类皮肤结构(表皮凸起层+真皮离子凝胶层)解决传统离子电子传感器的三大痛点:串扰、灵敏度与量程矛盾、复杂特征识别困难。凸起层设计实现应力集中(提升灵敏度)、消除串扰(降低95.8%位移干扰)和软硬识别功能。实验显示该传感器兼具超高灵敏度(8394.37kPa⁻¹)和宽量程(0-1000kPa),耐用性优异(5000次循环漂移<2%)。结