- @weixin_44044411
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
服务器抢占空闲GPU的Shell脚本
本文主要解决Python用户在【AutoDL】部署深度学习框架时可能踩的坑,例如频繁输入秘钥登录、使用root用户创建Python环境时频繁收到警告、在系统盘安装conda环境导致系统盘不够用等情况。

mmsegmentation 1.x版本教程详解,包括数据集自定义,模型训练,重要参数设置等

mmSegmentation开源语义分割框架详细入门教程,含自定义数据集、模型选择、训练参数设定等

VSCode 使用conda环境时Python找不到Module。不是那个没选环境的简单问题,是可能你不知道的错误。
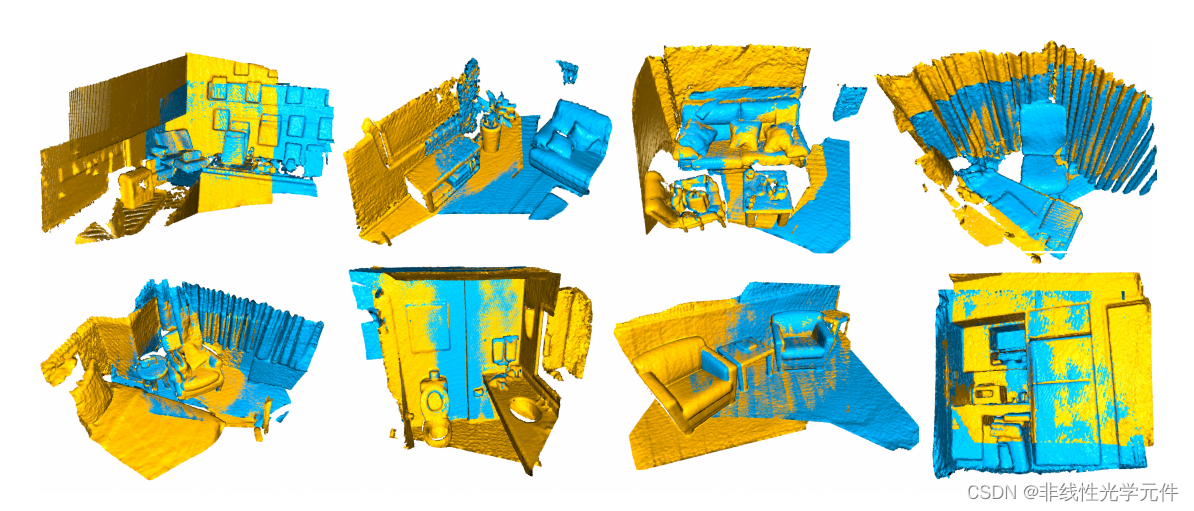
Deep Global Registration (CVPR2022) 论文解读
mmsegmentation 1.x版本教程详解,包括数据集自定义,模型训练,重要参数设置等
逆强化学习算法1:学徒学习。算法原理+算法步骤+代码+仿真:一个基于gym的小车上山的仿真。附赠学徒学习+Q-Table及学徒学习+DQN的全套代码。

目录引言绘图原理采点绘图设置坐标轴标尺成型引言学习电力电子的同学可能在私下里练习的时候非常需要三相线电压和相电压的辅助线。最近我随便找了一本书把Matlab可视化编程恶补了一下,给大家介绍一下这个波形辅助线是怎么做的。三相线电压辅助线就是一组相位相差60°的正弦曲线,三相相电压辅助线就是一组相位相差120°的正弦曲线。为了让曲线具有普遍性,我选的x坐标轴的间距都是π6\frac{\pi}{6...
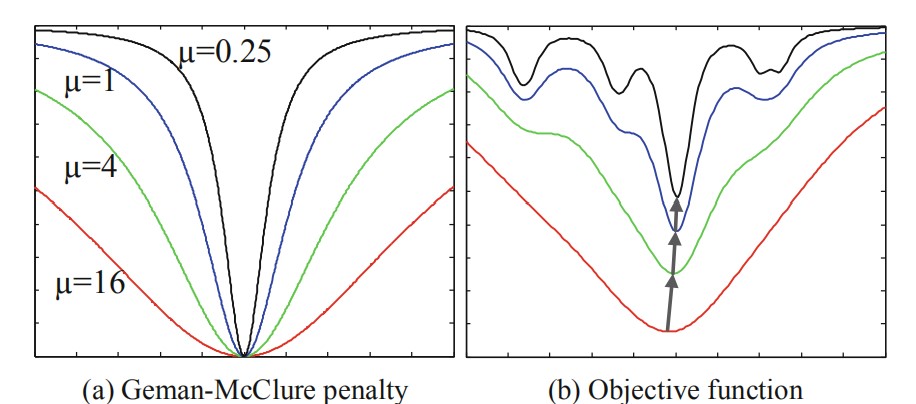
Fast Global Registration (ECCV 2016)论文中鲁棒函数及优化过程的推导过程。