




- @weixin_43912621
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
USB Manager模块是OpenHarmony系统中负责USB设备管理的核心服务模块,采用分层架构设计,主要提供四大功能:USB Host设备管理(设备枚举、数据传输)、USB Device功能切换(ACM/ECM/HDC等模式)、USB端口角色管理以及串口设备控制。模块采用单例模式、观察者模式等设计模式,通过SystemAbility方式运行,与驱动子系统、权限管理、公共事件服务等模块交互。
Github使用教程
OpenHarmony的communication_ipc模块是一个进程间通信(IPC)与远程过程调用(RPC)基础框架组件,提供本地Binder通信和跨设备DSoftBus通信能力。核心功能包括数据序列化、服务注册发现、死亡通知及多语言支持(C++/C/JS/Rust等)。该模块采用代理/存根分离、抽象传输层等设计模式,统一管理本地与跨设备通信,支持128MB大数据传输,并与系统服务管理(SAM
摘要:OpenHarmony的volumemanager模块提供卷设备管理功能,支持查询、挂载/卸载卷设备以及格式化操作。关键API包括getAllVolumes(获取所有卷信息)、mount(挂载卷)、unmount(卸载卷)和format(格式化卷)。使用需申请相应权限,仅支持特定文件系统类型(如vfat/exfat)。文档提供了错误码说明和测试示例代码,包含卷状态管理和操作界面实现。该模块为
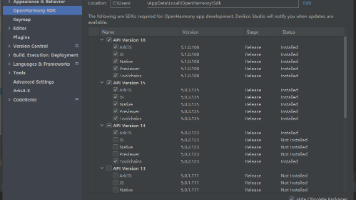
摘要:本文介绍了DevEco Studio开发环境及其SDK配置方法。DevEco Studio是华为提供的HarmonyOS应用开发IDE,支持ArkTS等多种语言。重点对比了Full SDK(包含系统级API)和Public SDK(基础功能)的区别,详细说明了Full SDK的获取方式(源码编译或OpenHarmony工作台下载)和替换Public SDK的步骤。同时阐述了OpenHarmo
startup_init模块是OpenHarmony系统的用户态启动入口(pid=1),负责从内核引导到系统服务拉起的全流程管理。该模块采用分阶段设计:第一阶段完成设备节点创建和关键分区挂载,第二阶段实现参数服务、配置加载和服务管理。核心功能包括服务生命周期管理(启动/停止/重启)、配置驱动的命令执行机制,以及崩溃恢复等容错处理。模块通过.cfg/JSON配置文件定义jobs和服务,采用状态机模式
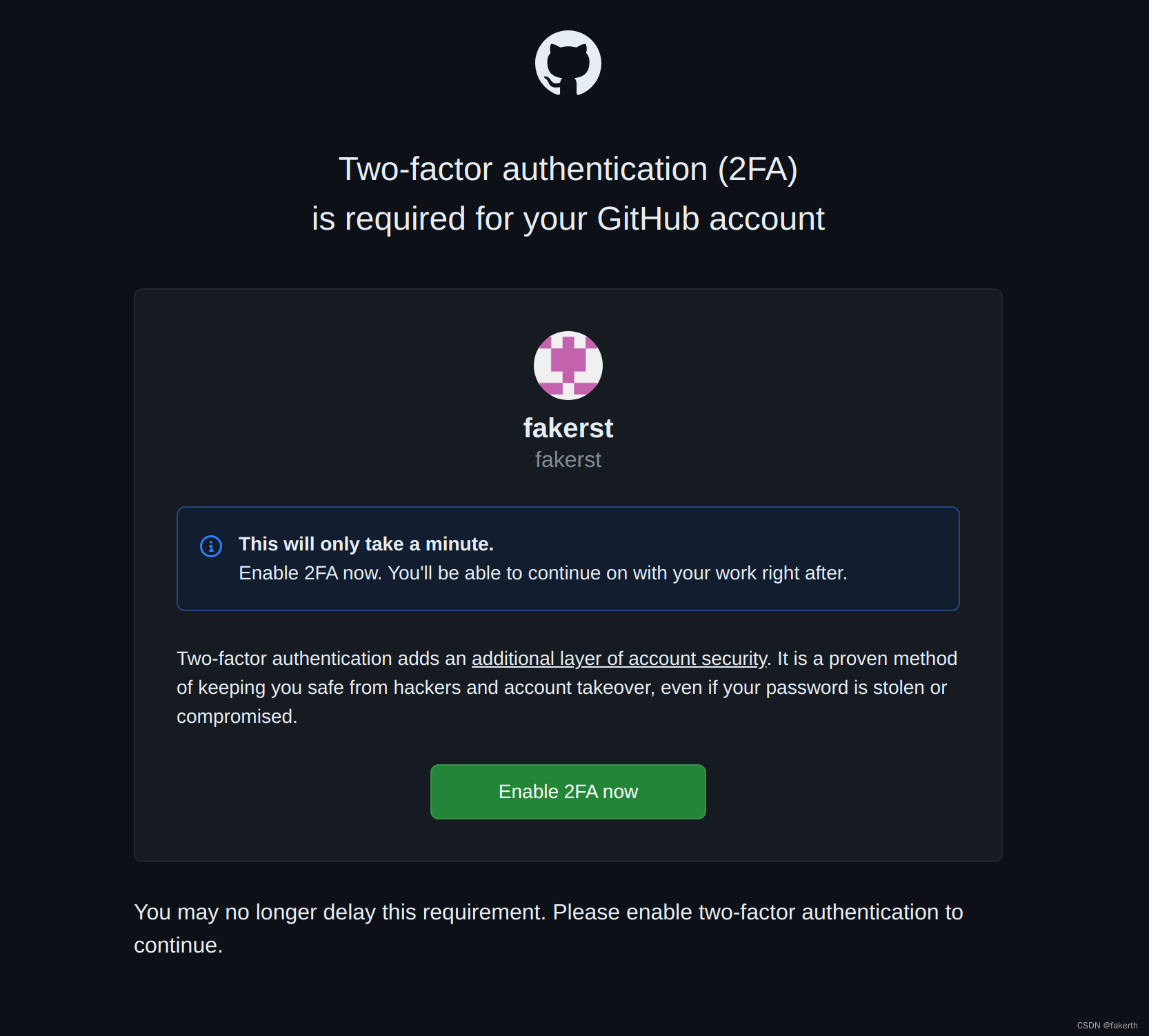
GitHub 向部分用户发出警告:如果在北京时间 2024 年 1 月 19 日 08:00 前仍未启用双重验证(2FA),他们将被禁用部分功能。当然,这对于 GitHub 用户来说并不算意外,因为 GitHub 早在 2022 年年中就宣布了这一措施,并且后续 18 个月中又进行了多次提醒。GitHub 指出了采取这一措施的必要性,主要是因为整个软件生态系统的 2FA 采用率总体上仍然很低。目前
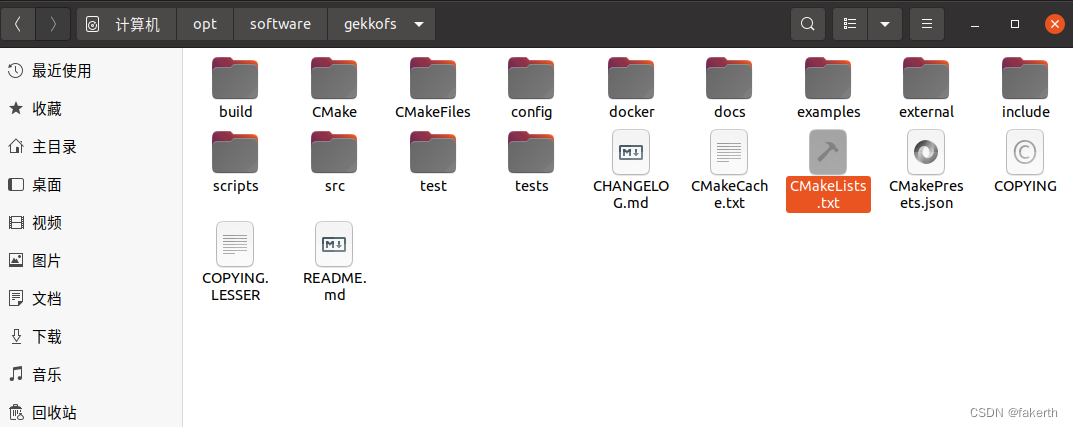
CMake Error: The source directory "XXX" does not appear to contain CMakeLists.txt
HiLog是OpenHarmony操作系统的核心日志系统,提供统一的日志打印和管理功能。该模块采用客户端-服务端架构,支持多语言接口(C/C++/JS/Rust)和多种日志类型(APP/CORE/INIT/KMSG)。主要功能包括日志分级管理(DEBUG/INFO/WARN/ERROR/FATAL)、流控机制、日志落盘和压缩存储。系统由三部分组成:接口层提供API,框架层处理日志格式化和传输,服务