
写文章




- @weixin_43907136
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
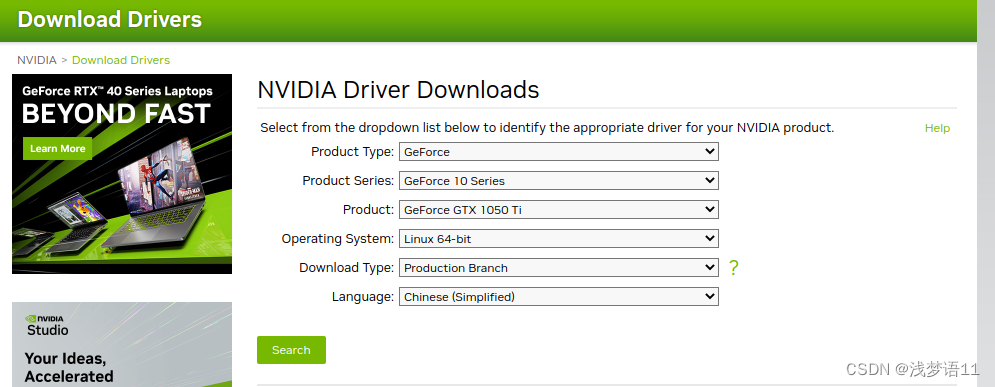
Ubuntu16.04检查并安装显卡驱动、安装cuda10.1和cudnn7.6.5
ubuntu16.04安装显卡驱动、cuda、cudnn
Ubuntu16.04安装旧版本tensorflow==1.8.0环境配置
ubuntu16.04通过Anaconda设置环境,安装低版本的tensorflow和对应cuda等。
python利用kmeans一维聚类和二维聚类
python利用sklearn做kmeans聚类
ubuntu升级eigen到3.4.0
ubuntu升级eigen版本到较高级版本如3.4.0。
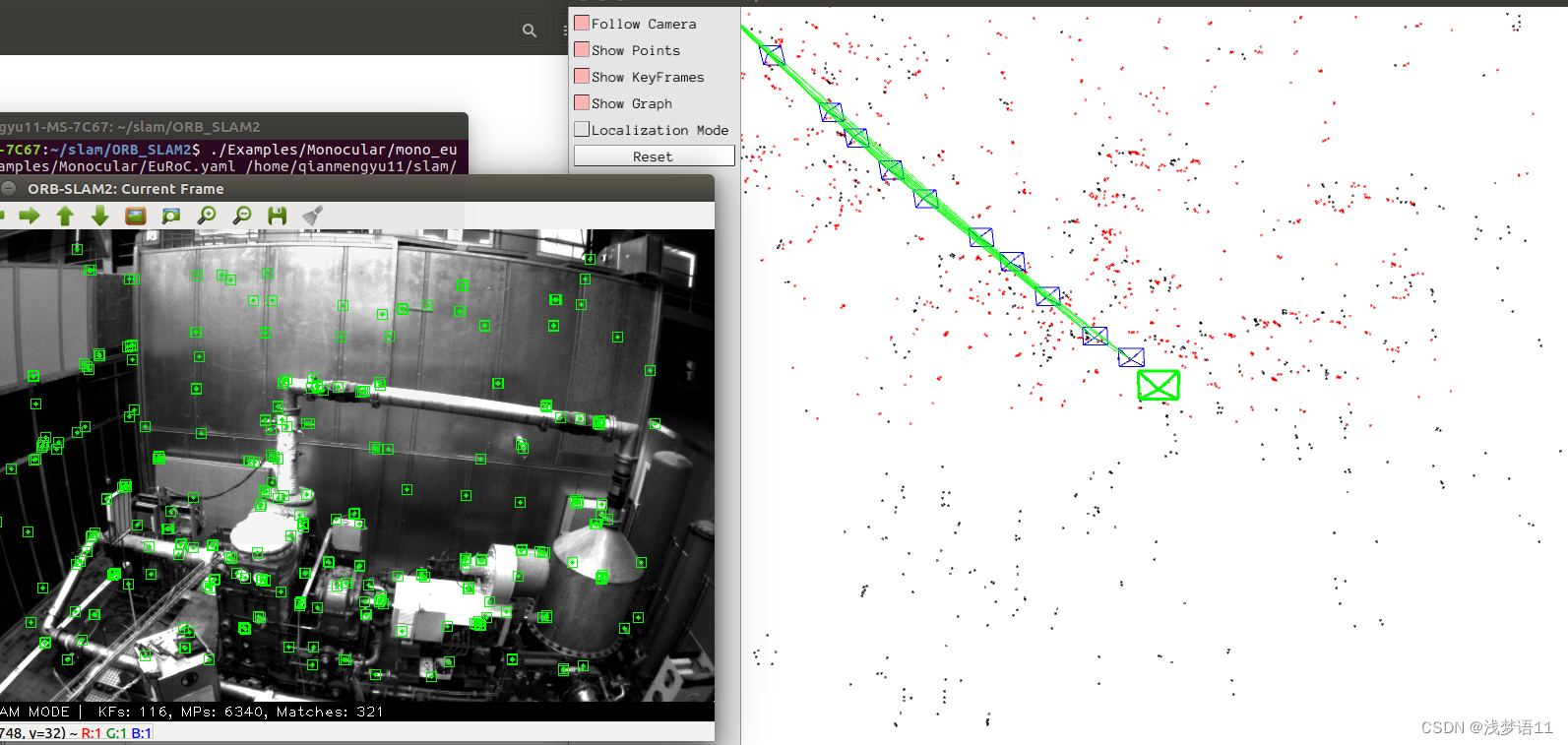
ORB_SLAM2下载编译及运行EuRoC数据集
orb-slam2的下载编译与EuRoC数据集的运行。
ORB_SLAM3运行EuRoC、TUM数据集和自己准备的单目鱼眼相机图像
ORBSLAM3使用鱼眼相机图片序列作为输入,输出位姿等。
ORB_SLAM3运行EuRoC、TUM数据集和自己准备的单目鱼眼相机图像
ORBSLAM3使用鱼眼相机图片序列作为输入,输出位姿等。
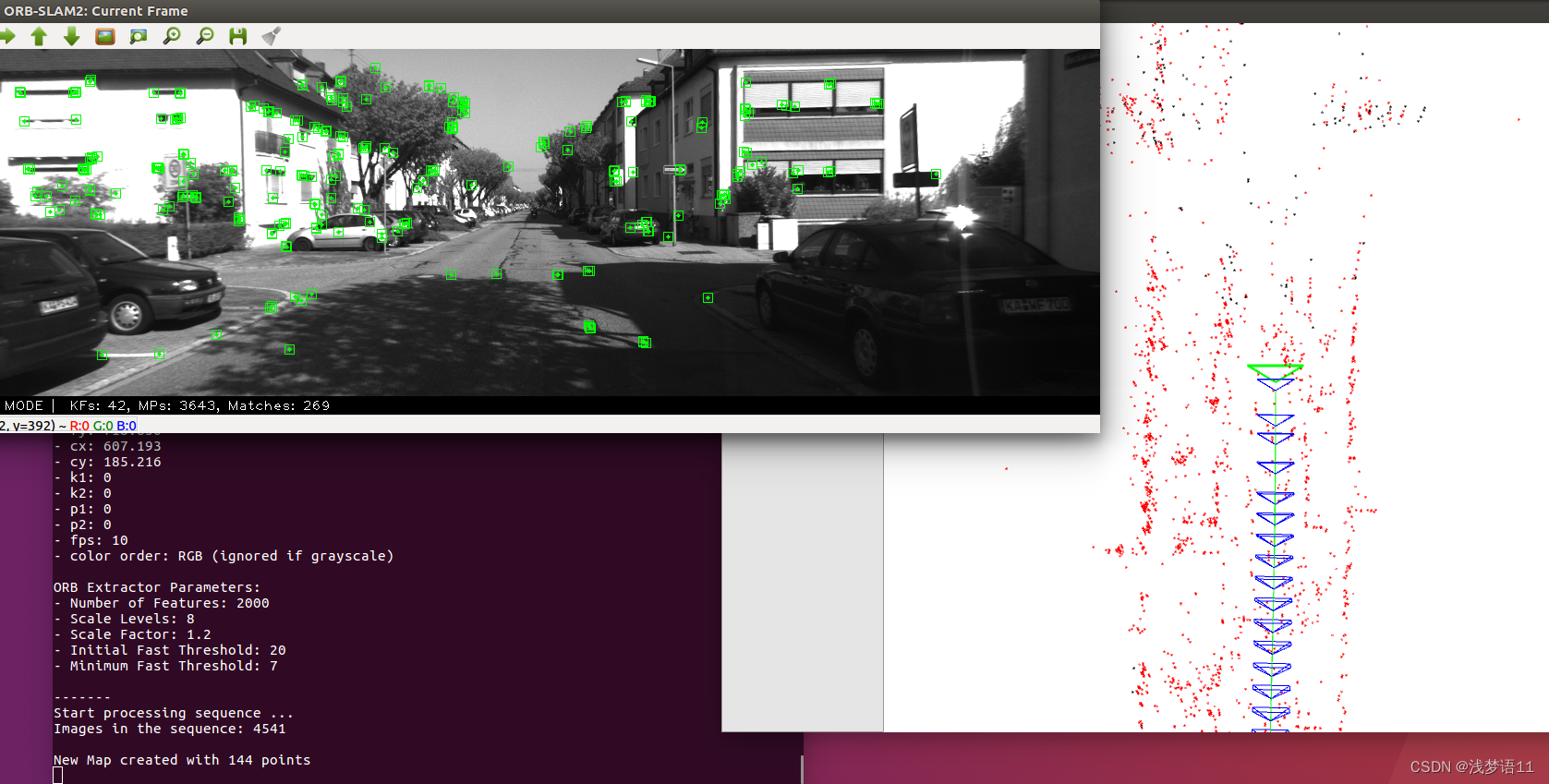
ORB_SLAM2运行KITTI数据集
ORB_SLAM2运行KITTI数据集
ORB_SLAM2下载编译及运行EuRoC数据集
orb-slam2的下载编译与EuRoC数据集的运行。
torchvision、torchaudio、torchtext安装:解决ModuleNotFoundError: No module named ‘torchvision‘问题
orchvision、torchaudio、torchtext安装:解决ModuleNotFoundError: No module named 'torchvision'等问题