




- @weixin_42875283
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
1.机器学习学习定义:A computer program is said to learn from experience E with respect to some task T and some performance mearsure P, if its performance on T,as measured by P, improves with experience E.2.监督学
简单遗传算法(SGA)由编解码、个体适应度评估和遗传运算三大模块构成,而遗传运算又包括染色体复制、交叉、变异甚至倒位等。编码设某一参数的取值范围为(L,U),使用长度为k的二进制编码表示该参数,则它有2k种不同的编码。解码将不直观的二进制数据串还原成十进制。设某一个体的二进制编码为bkbk-1bk-2……b3b2b1,则对应的解码公式为:交配首先用随机数产生一个或多个交配点位置,然后两个个体在交配
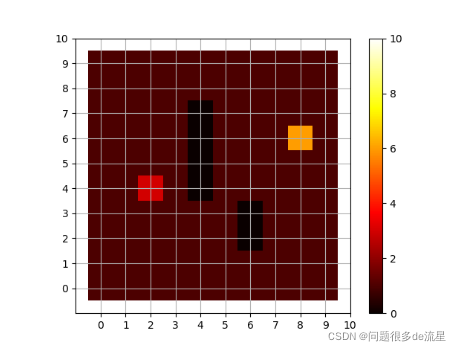
提示:本人是第一次学习A*算法,记录自己的学习过程,捋清其原理步骤,并利用python做一个小例子实现。目录A*算法的基本原理A*算法的应用场景A*算法的思想A*算法的定义A*算法的路径规划步骤A*算法路径搜索的图示演示A*算法的代码举例1.引入库2.读入数据总结A*算法的基本原理将从应用场景、思想、基本的定义进行说明A*算法的应用场景一副地图中有坐标A和B,而A和B之间可能存在一些障碍,需要找到
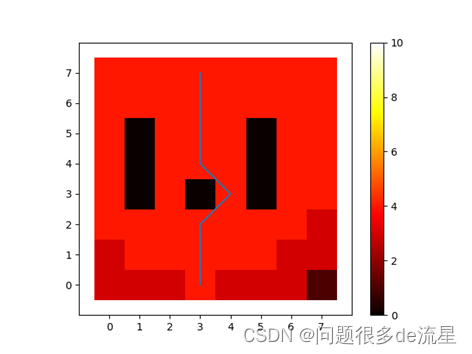
提示:前文写了D搜索算法,是一种贪心算法。文章目录前言一、D*算法是什么?二、原理以及代码步骤1.原理分析2.读入数据总结前言提示:这里可以添加本文要记录的大概内容:例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。提示:以下是本篇文章正文内容,下面案例可供参考一、D*算法是什么?D*算法也是用于机器人路径规划问题的启发式方法,
机器学习实战开一个专题写一个机器学习的python实战练习,这个专题所有博文的知识都来自《机器学习实战:基于scikit-learn、keras和Tensorflow》机器学习的基础知识(已完成)训练深度神经网络使用TensorFlow自定义模型和训练使用TensorFlow加载和预处理数据使用卷积神经网络的深度计算机视觉使用RNN和CNN处理序列使用RNN和注意力机制进行自然语言处理使用自动编码
先说一下我遇到的问题:在windows系统中用VScode写python代码然后通过U盘拷到树莓派Unbuntu18.04系统中ROS的工作空间中,执行rosrun ×××××.py时,出现错误/usr/bin/env:‘python\r’ :no such file百度了一下发现是:#!/usr/bin/env python在ubuntu会变成#!/usr/bin/env python\r而\r
机器学习实战机器学习的基础知识(已完成)训练深度神经网络使用TensorFlow自定义模型和训练使用TensorFlow加载和预处理数据使用卷积神经网络的深度计算机视觉使用RNN和CNN处理序列使用RNN和注意力机制进行自然语言处理使用自动编码器和GAN的表征学习和生成学习强化学习大规模训练和部署TensorFlow模型文章目录机器学习实战前言一、真实的数据来源二、观察大局1.框架问题2.选择性能

机器学习实战机器学习的基础知识(已完成)端对端的机器学习项目(已完成)训练深度神经网络使用TensorFlow自定义模型和训练使用TensorFlow加载和预处理数据使用卷积神经网络的深度计算机视觉使用RNN和CNN处理序列使用RNN和注意力机制进行自然语言处理使用自动编码器和GAN的表征学习和生成学习强化学习大规模训练和部署TensorFlow模型文章目录机器学习实战前言一、MNIST二、训练二
提示:前文写了D搜索算法,是一种贪心算法。文章目录前言一、D*算法是什么?二、原理以及代码步骤1.原理分析2.读入数据总结前言提示:这里可以添加本文要记录的大概内容:例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。提示:以下是本篇文章正文内容,下面案例可供参考一、D*算法是什么?D*算法也是用于机器人路径规划问题的启发式方法,
