- @weixin_40359938
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
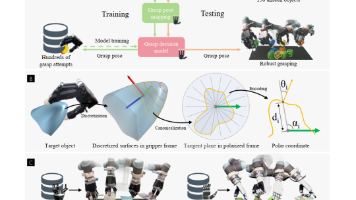
通过个性化的训练和优化,AnyDexGrasp 能够根据不同机械手的特点调整其策略,从而在多变的任务环境中保持高效的抓取能力。接着,针对每一种机械手,通过现实世界的试错训练出独特的抓取决策模型,将这些表示转化为最终的抓取姿势。每一个抓取决策子模型都是通过神经网络学习得到的,它接收一个接触中心抓取表示作为输入,并输出一个介于0到1之间的分数,指示相应的抓取候选是否可能成功。例如,在实验中,研究人员发
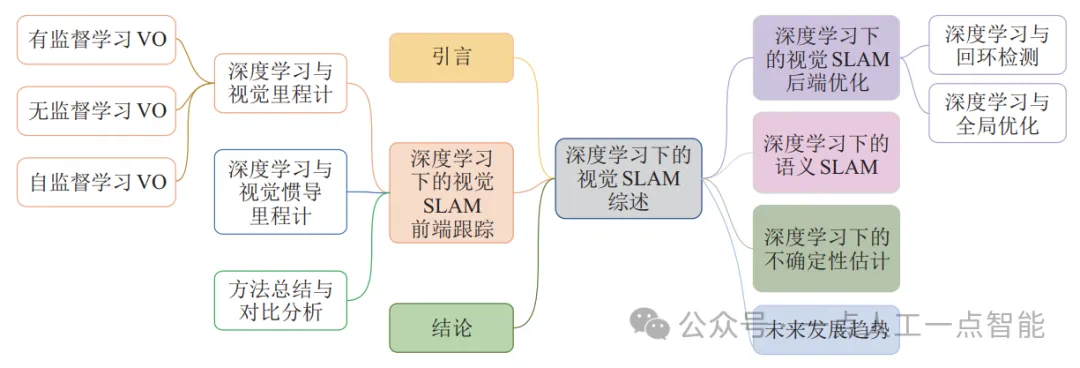
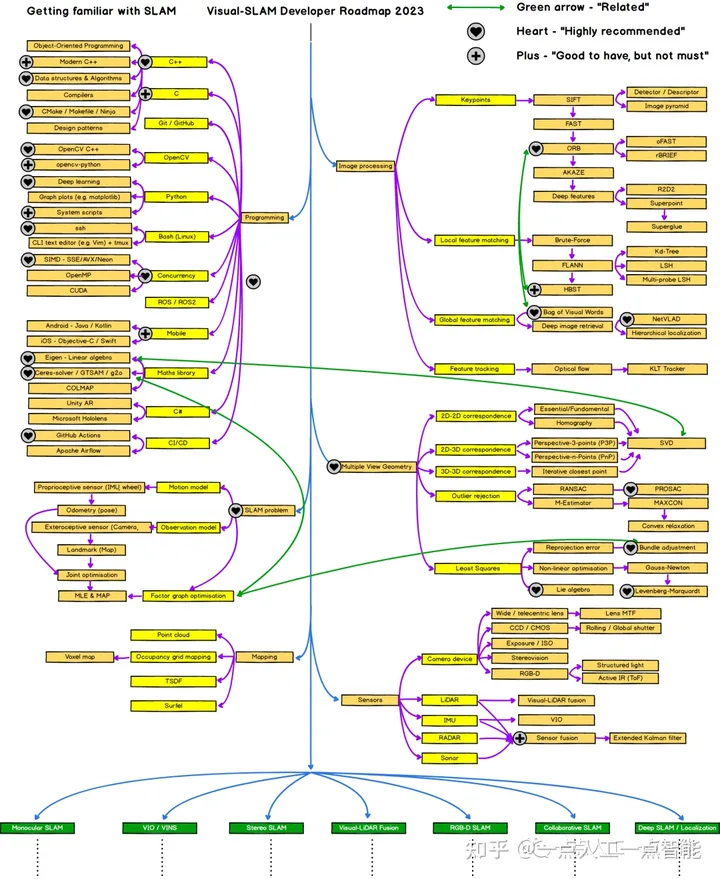
本综述涵盖了深度学习技术应用到SLAM领域的最新研究成果,重点介绍和总结了深度学习在前端跟踪、后端优化、语义建图和不确定性估计中的研究成果,展望了深度学习下视觉SLAM的发展趋势,为后继者了解与应用深度学习技术、研究移动机器人自主定位和建图问题的可行性方案提供助力。
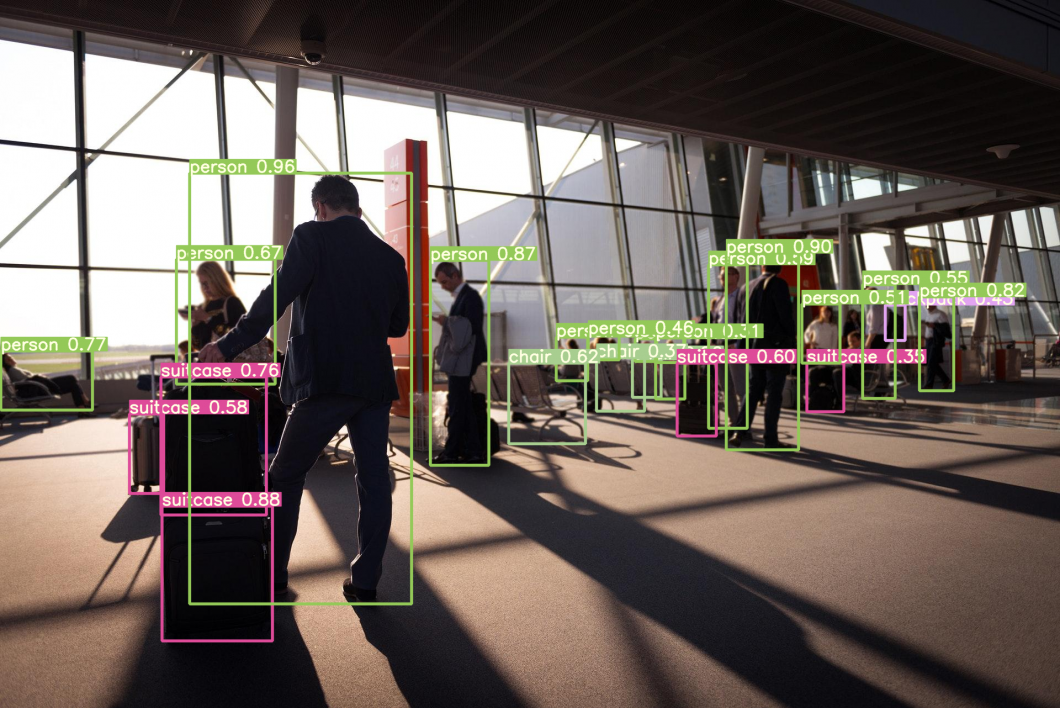
这篇文章,是对图像分类的技术做了一个简单的入门级的介绍,包括图像分类的重要性、基于机器学习/深度学习的图像分类介绍、实际的应用方向等等。
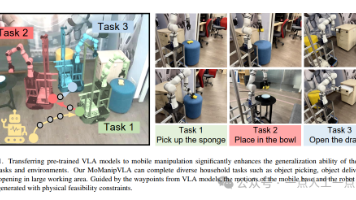
MoManipVLA的核心创新在于利用预训练VLA模型生成高泛化能力的末端执行器路径点,并通过双层次轨迹优化框架(Bi-Level Optimization)联合规划基座与机械臂的运动轨迹,确保物理可行性(如可达性、平滑性、碰撞避免)。
原文链接:https://zhuanlan.zhihu.com/p/115599978 未经作者允许,禁止二次转载微信扫码,回复:开源SLAM,即可获取全文文档(共97个方案,本文22个)本文简单将各种方案分为以下 7 类(固然有不少文章无法恰当分类,比如动态语义稠密建图的 VISLAM +_+):Geometric SLAMSemantic / Deep SLAMMulti-Landmarks
前两部分,主要是基础知识点的梳理,各位伙伴如果需要相关的书籍资料以弥补基础,可以添加微信(puxiaoke6),询问是否有相关的资料书籍推荐(免费服务)。3. 每个人的基础不同,要根据自己的接触进行合适的学习路线调整,不要一味地依赖于现有的学习路线图!论文集包含后三个部分中提到的各个主要论文,其中大部分论文均提供了代码或者项目地址,便于同学们在自学时深入实践,获得更好地知识。1. 有些项目代码并非
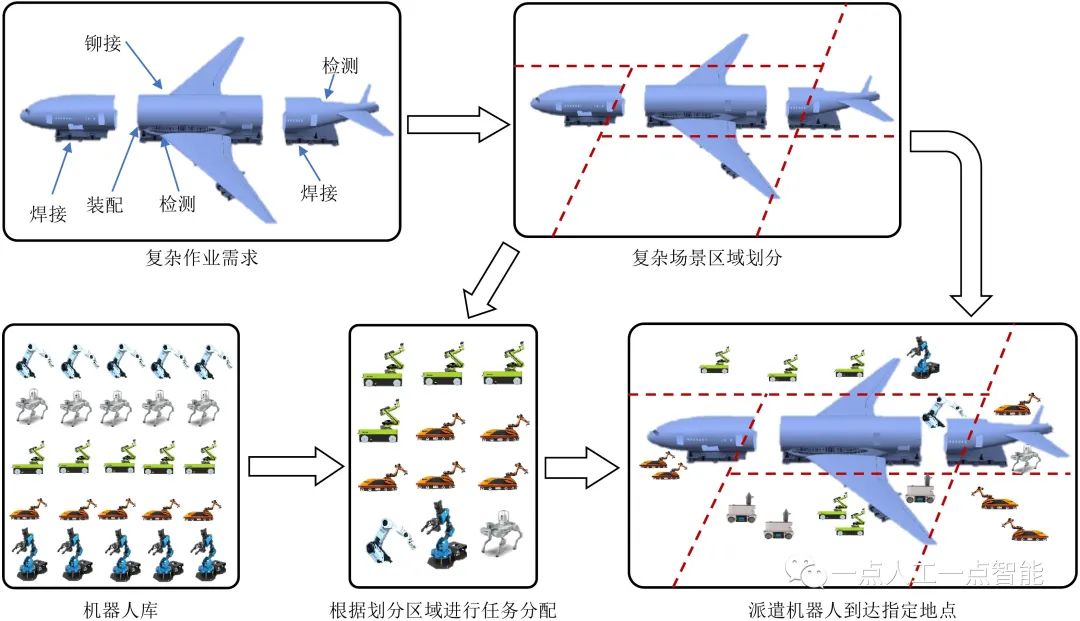
本文针对任务分配过程对线性规划方法、基于市场的方法、启发式算法及深度强化学习算法进行了分析,同时针对运动规划对基于搜索的规划方法、基于势场的规划方法、基于采样的规划方法及人工智能规划方法进行了描述。在此基础上对算法产生的计算时间问题、可行解问题、维度问题及通信的鲁棒性问题进行了总结。
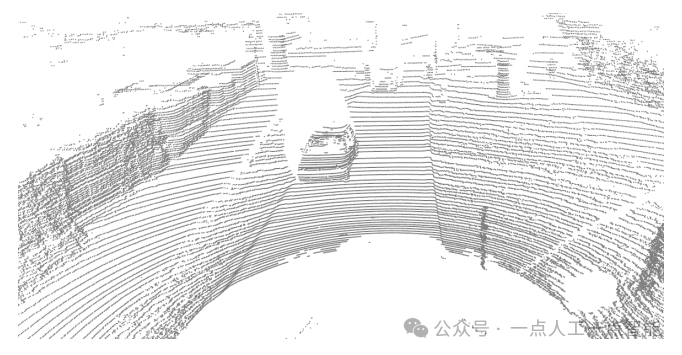
本文根据环境目标检测中基于图像和点云的相关技术,对基于深度学习的环境目标检测进行了阐述。首先介绍了3D目标检测的常用数据集和数据格式,其次按照不同的数据输入形式和模型内部的数据表示形式对3D目标检测算法进行划分。尽管环境目标检测在自动驾驶及数字仿真技术领域有着很大的潜力,但目前仍然存在着一些问题和挑战。
这篇文章,是对图像分类的技术做了一个简单的入门级的介绍,包括图像分类的重要性、基于机器学习/深度学习的图像分类介绍、实际的应用方向等等。
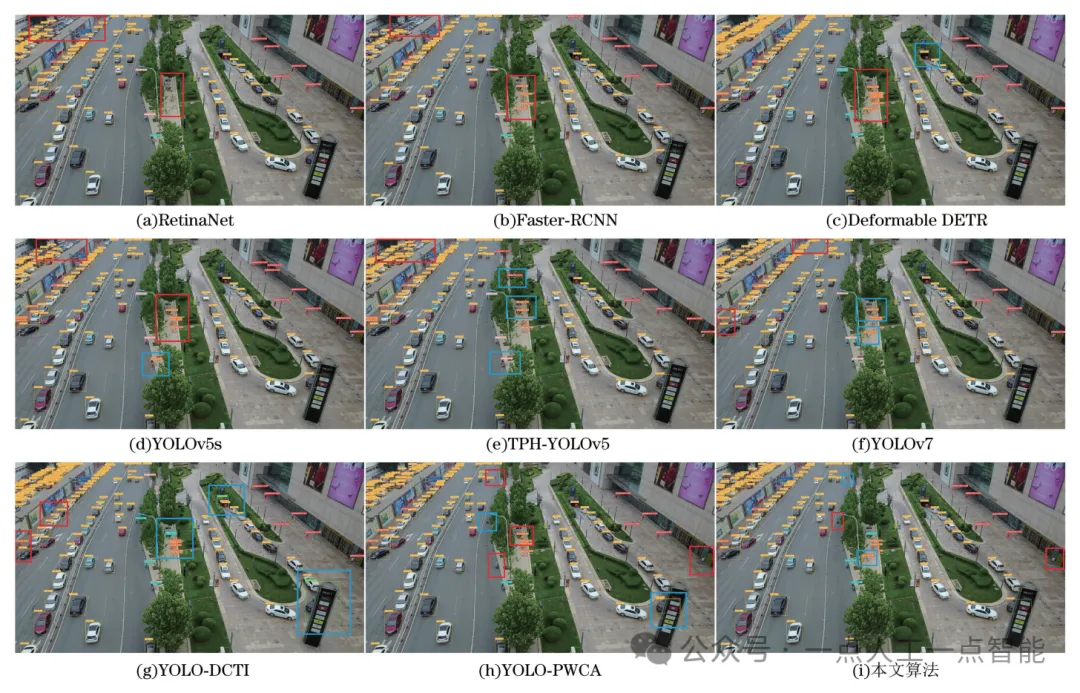
在无人机(UAV)目标检测任务中,存在因检测目标尺度小、检测图像背景复杂等原因导致的漏检、误检问题。针对上述问题,提出改进YOLOv8s的无人机图像目标检测算法。首先,针对无人机拍摄目标普遍为小目标的应用场景,减少算法骨干网络(Backbone)层数,增大待检测特征图尺寸,使得网络模型更专注于微小目标;其次,针对数据集普遍存在一定数量低质量示例影响训练效果的问题,引入Wise-IoU损失函数,增强