




- @shyjhyp11
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
使用安装 uView-Plus 的步骤与 npm 类似,但需要注意一些 pnpm 特有的配置。
你的需求推荐算法理由快速原型 / 通用 SfMLoFTR成熟度高,开源支持好(COLMAP 已集成),在大多数室内外场景表现稳定。稠密重建 / 深度估计DKM输出稠密对应,能直接服务于 MVS 或深度图生成。极端条件(无人机、跨季节)RoMa (v2)利用 DINO 的强泛化能力,在视角/光照剧烈变化时最不容易“翻车”。高精度位姿 + 可信度RoMa v2唯一提供逐像素协方差估计,
作者:buldajs链接:https://www.zhihu.com/question/53354718/answer/207687177来源:知乎Depth Map Prediction from a Single Image using a Multi-Scale Deep NetworkNIPS2014,第一篇CNN-based来做单目深度估计的文章。基本思想用的是一个Multi-scale
卷积后卷积层大小W2= (W1-F+2P)/S +1即 (原始图像的宽度-卷积核的宽度+2倍的填充宽度)/步长 + 1采用K个大小为FxF的卷积核,进行步长为S, 填充为P的卷积运算后,得到的层的宽为W2,高为H2, 深度为D2,计算如下所示。参数量大小(FxFxD1)xK + K即(卷积核宽x卷积核高)x卷积核的个数 + 偏差个数(即卷积核的个数,每一层有一个bias)Padding的大小P =
1.首先先定义进行卷积的参数:输入特征图为高宽一样的Hin*Hin大小的x卷积核大小kernel_size步长stridepadding填充数(填充0)输出特征图为Hout*Hout大小的y计算式子为:Hout = floor(Hin + 2*padding - kernel_size / stride) + 12.然后实现上面的卷积的转置卷积定义其参数为:输入特征图为高宽一样的Hout*Hout
随机梯度下降(SGD):每次迭代仅使用 ** 单个样本(或小批量样本)** 计算梯度,更新模型参数,是批量梯度下降(BGD)的简化版,兼顾训练效率与收敛效果。:自适应学习率优化器,融合了动量(Momentum)和RMSprop的优点,能自适应调整每个参数的学习率,是当前深度学习中最常用的优化器之一。公式核心:SGD 是 “固定学习率 + 梯度直接更新”,Adam 是 “一阶 / 二阶动量 + 偏差
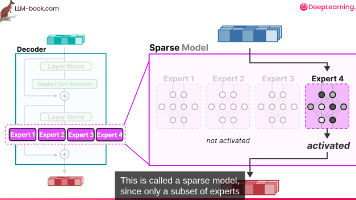
MoE架构已成为当前主流大模型突破“参数规模-计算成本”瓶颈的关键技术。它通过稀疏激活和动态路由,让模型能够以可控的成本扩展到万亿级参数,是构建下一代更强、更高效AI系统的重要基石。
景象匹配技术(Scene Matching)是一种基于图像特征比对的导航与定位技术。它通过将实时传感器获取的“实时图”与预先存储的“基准图”进行高精度配准,从而确定载体(如导弹、无人机)的精确位置。这项技术最核心的价值在于,在GPS/北斗受干扰或拒止的环境下,依然能实现米级甚至亚米级的末端制导精度。景像匹配技术,本质上是一种让飞行器(如导弹、无人机)拥有“视觉导航”能力的技术。它通过将飞行中实时拍
MPMF-Net是2025年发表在AAAI上的一种图像修复网络,专门用于(如雨、雾、雪等)。它在单一模型中处理多种天气类型,核心思路是解决两个问题:如何高效提取多样化特征,以及如何在特征内部实现精准的信息融合。它的创新主要包含三个技术层面,以下逐一拆解其原理与效果。
RoPE 是什么:一种通过复数旋转来编码位置信息的技术。它做了什么:让 Attention 计算能天然捕捉 token 之间的相对距离。为什么重要:它是现代 LLM(如 Llama)能处理长文本、并具备强大泛化能力的底层支撑之一。如果你看代码,RoPE 通常体现在这样的函数中,它会在计算 Q、K 之前,对它们进行旋转变换。你看到的公式:是 RoPE 在复数域的优雅表达,证明了注意力分数只依赖相对位