- @qq_59475883
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
tf2 - ROS Wikihttp://wiki.ros.org/tf2tf已经被弃用,取而代之的是tf2。tf2是转换库的第二代,它允许用户随时间跟踪多个坐标帧。tf2在时间缓冲的树结构中维护坐标帧之间的关系,并允许用户在任何所需的时间点在任意两个坐标帧之间转换点、向量等。一、tf2的作用以及为什么要使用tf2如果你不光想要只是阅读文档而是想看看tf2到底能干什么,查看下面的简介演示连接:tf
WSL 本身并不支持连接 USB 设备,因此你需要安装开源 usbipd-win 项目
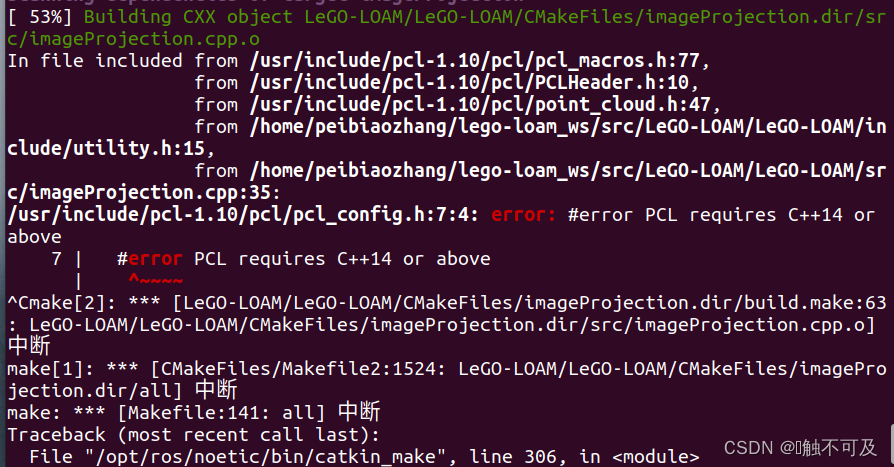
下载的OpenCV4.*版本的头文件的路径中多了一个opencv4文件夹,CMakeLists.txt里##build##模块寻找的路径是usr/include,这样找不到opencv2这个文件夹。在报错下面提示的那个CMakeLists.txt中##build##模块加入usr/include/opencv4,即可编译成功。
点云是一种能够直观地表示和操作3D传感器所提供数据的方式,这类传感器包括深度摄像头和激光雷达。该类传感器在三维坐标参考系下对空间进行有限点集采样构成点云。通俗的来说,点云就是分布在三维空间的有限个点,这些点具体化的表示了三维传感器所采集到的数据,我们可以很容易的通过点云来查看空间中物体的位置。
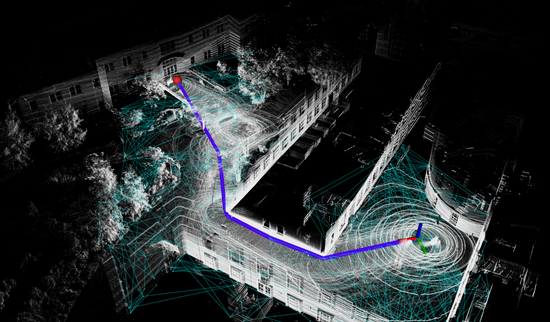
本文参考资料:GitHub - MichaelFyang/far_planner:在已知和未知环境中导航的快速,可尝试的路线规划器https://github.com/michaelfyang/far_planner【泡泡前沿专栏•重磅】全网首发,系列(四):CMU团队开发的全套开源自主导航算法——FAR Planner全局路径规划算法 (qq.com)https://mp.weixin.qq.c
不兼容的问题,打开lego-loam的~/lego-loam_ws/src/LeGO-LOAM/LeGO-LOAM/src下的4个源码文件,搜索/camera_init,将所有/camera_init改成camera_init,也就是去掉斜杠,这样再回到工作空间重新编译lego-loam。3、速腾16线激光雷达RS-16 ----- 3D建图算法LeGO-LOAM的使用(Ubuntu18.04 +
将雷达信号线连接至电脑(注意:如果电脑没有网口需要转接线连接的话,转接线的接口协议一定要USB3.0以上,插入电脑的USB口也应是3.0以上,否则雷达传输数据时会丢包)。
当确定好雷达正常运行、lego-loam正常运行后,就可以开始使用雷达实时运行lego-loam了。

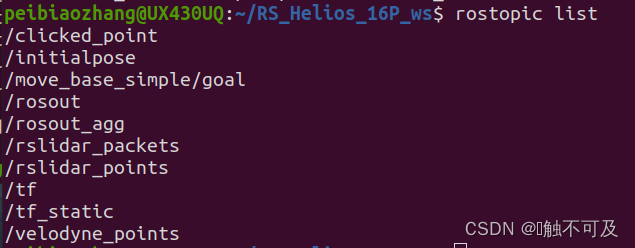
上面这个图是相机融合IMU的bag包,我们可以看到5个话题(topics),由于这是相机数据,我们在rviz中的add中选择image,然后在添加的image中的Image Topic写上话题名称,如/cam00/image_raw这个话题,这里有4个相机数据,所以我们添加4次image,每个Image Topic写上对应的话题,再播放需要的bag包就可以在rviz中看到了可视化的数据。当确定好雷