
写文章




- @qq_59068750
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
node版本管理工具n(mac/linux)
安装n管理node版本
window的wsl2 ubuntu安装图形化界面
【代码】window的wsl2 ubuntu安装图形化界面。
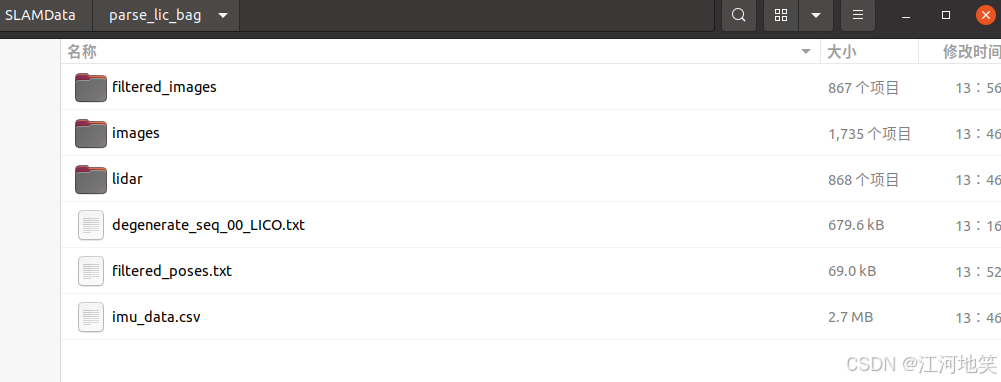
多传感器融合(.bag)
其中filtered_images、filtered_poses.txt、lidar 记录条数都是867,实现了多传感器融合。2、Coco-LIC算法计算时间戳位姿。基于点云数据对其图像数据。基于点云数据对其位姿数据。1、解析.bag文件。
opencv编译4.2失败
这通常是因为在 OpenCV 的某些配置中,SIFT 功能被排除在外。

L4_undistort_image
【代码】L4_undistort_image。
25条提高SQL运行效率的方式
25条提高SQL运行效率的方式!!!(索引占大部分)
LocalStorage存储对象
localStorage使用

到底了