




- @qq_57082933
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
3D点云的深度学习网络主要可以分为以下几类

3D点云的深度学习网络主要可以分为以下几类
如果按照作用来分类,3D点云深度学习网络可以分为以下几类:
相机标定是计算机视觉的基础工作,主要用于获取相机内参数(焦距、主点坐标、畸变系数),建立精确的几何关系,消除镜头畸变,并实现精确测量。需要标定的场景包括工业检测、3D视觉、机器人视觉和自动驾驶等精确测量应用。主流标定工具包括OpenCV、MATLAB工具箱和ROS等开源工具,以及Halcon等商业软件。标准标定板有棋盘格、圆点阵、ArUco标记等类型。无需标定的场景包括一般图像处理和粗略视觉应用。
这篇摘要介绍了10个提升科研效率的AI工具,按功能分类整理:ChatGPT和Writefull用于构思写作;Semantic Scholar、Research Rabbit等5款工具专注文献检索与趋势分析;Scite.ai提供智能引用分析;Paperpile和Zotero管理文献;Scholarcy快速生成摘要;Open Knowledge Maps可视化知识网络。文末还附有工具功能对照表,方便研
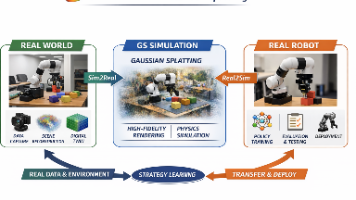
基于高斯点渲染(Gaussian Splatting)的Sim2Real2Sim仿真平台成为研究热点,通过高保真重建缩小仿真与现实的视觉差距。主要平台包括:1)RoboGSim:闭环仿真平台,结合GS重建与物理引擎,支持策略评估与迁移;2)RoboSimGS:融合GS渲染与物理交互,适合机械任务;3)SplatSim:专注视觉质量提升,实现零样本策略迁移;4)GSWorld(研究阶段):结合GS与
如果按照作用来分类,3D点云深度学习网络可以分为以下几类:
本文摘要:文章涵盖多个技术领域概念解析,包括:(1) 训练Transformer语言模型(Train TLS)的定义;(2) 农业AI中专用芯片(如Jetson、Edge TPU等)相比CUDA在边缘推理的低功耗、实时性优势;(3) IEEE农业机器人技术委员会(AgRA-TC)的成员分级;(4) 传感器噪声(sensor noise)的定义与实例;(5) 遥操作(Teleoperation)的远
每天进步一点点——分类问题之判别分析