- @qq_55433305
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
针对 DuMate 桌面 AI 智能体强制占用 C 盘空间的问题,从成因、排查到清理。
16位灰度图转8位的直接截断、线性缩放、直方图均衡、自适应 min-max 映射等方法
一个多线程 Python 脚本因依赖缺失导致"假死"的排查
详细记录了如何用CC Switch + Claude Code + DeepSeek搭建一套低成本、高可用的AI编程助手
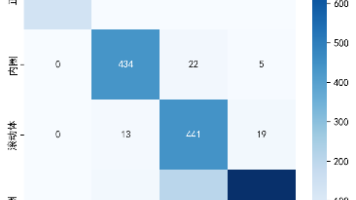
1.数据集简介、训练集与测试集划分2.模型相关知识3.model.py——定义ResNet50网络模型4.train.py——加载数据集并训练,训练集计算损失值loss,测试集计算accuracy,保存训练好的网络参数5.predict.py——利用训练好的网络参数后,用自己找的图像进行分类测试

一文看懂 NPU/RKNN 量化黑魔法,对比 GPU/TPU/FPGA 性能、功耗、灵活性,给出手机、边缘、云端场景实测数据
机器学习时间序列算法数据集划分规则
实现提供了一个完整的端到端解决方案,从服务器端模型部署到本地GUI调用。你可以根据需要进一步自定义界面和功能。
2025年中国研究生数学建模竞赛试题E题全流程:从MATLAB数据清洗、小波去噪、FFT+CNN提特征,到迁移学习+SHAP可解释,附Python代码与调参技巧
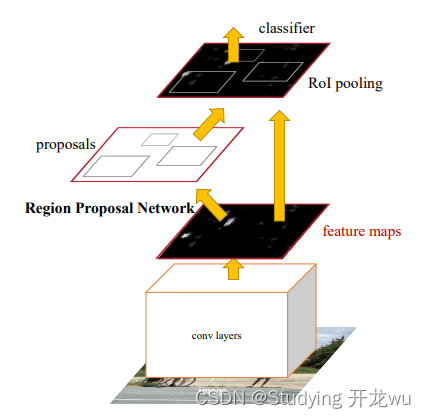
Faster R-CNN “从论文背景到代码细节” 一次性讲透。先回顾 R-CNN → Fast R-CNN 的进化痛点:候选框外置、特征重复计算、训练分段。随后聚焦 Faster R-CNN 的“一箭三雕”——RPN 网络内生候选框、共享卷积特征、端到端多任务损失,彻底拔掉速度瓶颈。Faster R-CNN:用RPN网络内生候选框,共享卷积端到端训练,5步流程秒懂;精度和速度双升,却显存高、调参