
写文章




- @qq_53086461
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
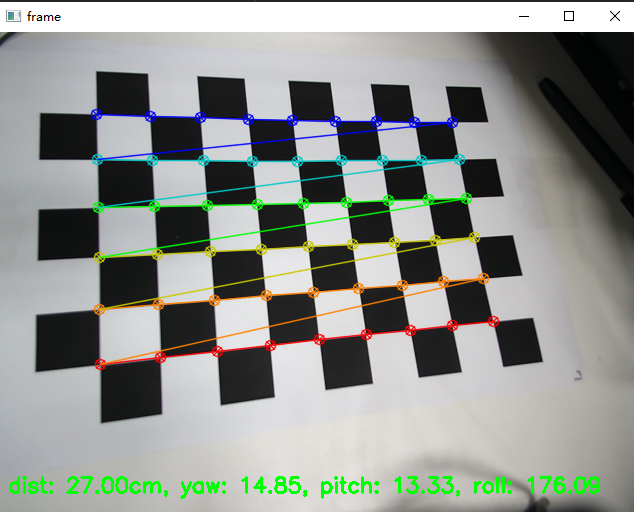
(九)相机内参、外参、反透视变换python opencv
将相机平面投影到地面平面
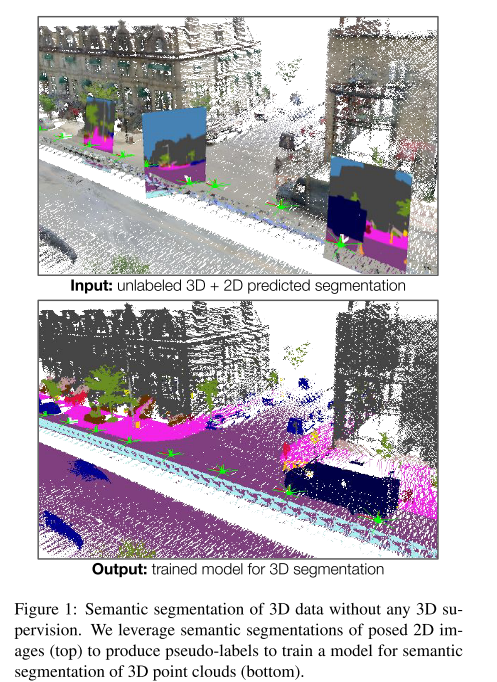
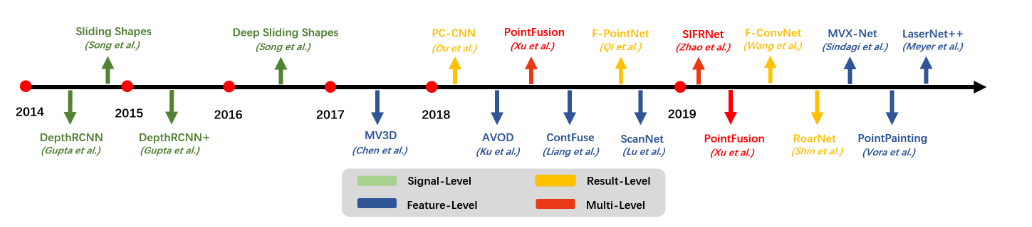
论文阅读:综述 Deep Learning for Image and Point Cloud Fusion in Autonomous Driving: A Review 自动驾驶中图像和点云融合
1、到目前为止,还没有针对基于深度学习的摄像机-激光雷达融合方法的重要评论。为了弥合这一差距并激励未来的研究,本文致力于回顾最近利用图像和点云的基于深度学习的数据融合方法。2、图像+点云的数据处理 的深度学习:深度补全、目标检测、语义分割和跟踪。
论文阅读:PVT v2: Improved Baselines with Pyramid Vision Transformer
尽管卷积神经网络(cnn)在计算机视觉领域取得了巨大的成功,但本研究研究的是一种更简单、无卷积的骨干网络,可用于许多密集的预测任务。与最近提出的专门为图像分类而设计的视觉转换器(Vision Transformer, ViT)不同,我们引入了金字塔视觉转换器(Pyramid Vision Transformer, PVT),它克服了将Transformer移植到各种密集预测任务中的困难。与目前的技
(九)相机内参、外参、反透视变换python opencv
将相机平面投影到地面平面
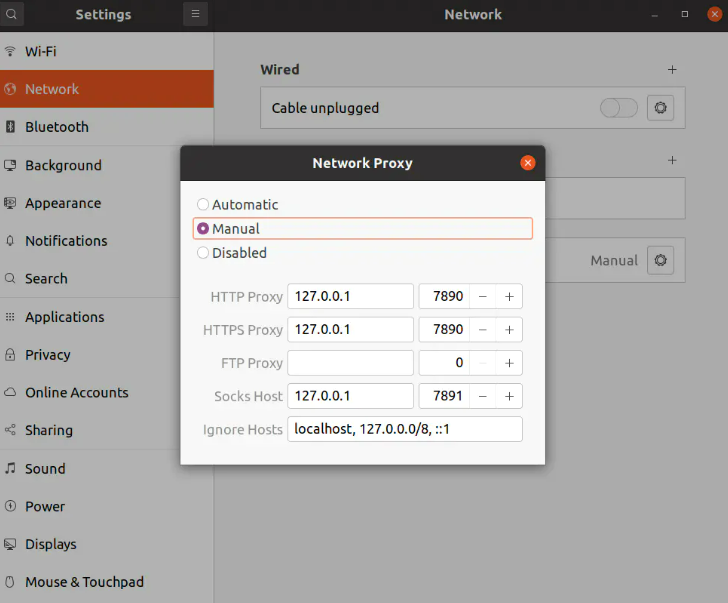
ubuntu系统配置远程登陆、clash、图像化配置
ubuntu系统配置远程登陆、clash、图像化配置
到底了