




- @qq_45752541
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
文章摘要:机器人强化学习(RL)需在仿真环境中训练以避免实体设备损坏,但仿真环境必须高度逼真才能确保策略可迁移至真实场景。Niantic Spatial与Flexion提出完整流程:通过普通RGB相机扫描目标场地,利用3D Gaussian splatting技术重建高保真数字孪生场景,结合NVIDIA Isaac Sim进行仿真训练,最终实现zero-shot迁移至实体机器人。该方案攻克了视觉与

文章目录前言(所有检测模型)五、RRPN(倾斜文本)1.概述2.网络结构3.旋转边界框的表达(Rotated Bounding Box Representation)4。旋转的锚点(Rotation Anchors)5.兴趣区域的学习(Learning of Rotated Proposal)6.区域提取网络的优化(Accurate Proposal Refinement)7.RRoI Pooli
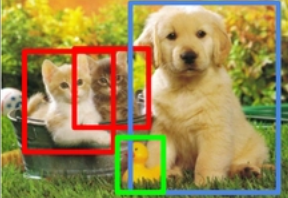
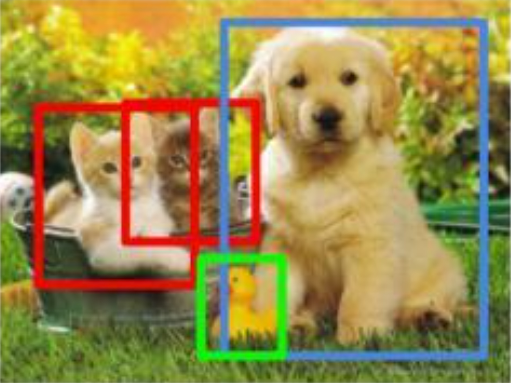
Grounding DINO,一种开集目标检测方案,将基于Transformer的检测器DINO与真值预训练相结合。开集检测关键是引入自然语言至闭集检测器,用于open world的检测。Grounding DINO将检测器分为三个阶段的紧密融合方案,包括。可实现对新颖类别进行检测,特定属性目标识别。在COCO数据集上零样本检测达到52.5AP,在COCO数据集finetune后达到63AP。
sam作为首个分割一切的zero shot 图像分割模型,展现出了强大性能。紧随其后,今年陆续出了FastSAM 与 MobileSAM两个加速版本。博主已经安装,亲测效果很棒

DETR将过少的 Query 分配为正样本,采用一对一的集合匹配,会导致对编码器输出的监督稀疏,严重损害编码器的区分特征学习。本文提出了一种新颖的协同混合分配训练方案,名为Co-DETR,以从多样的标签分配方式中学习更高效、更有效的基于DETR的检测器。这种新的训练方案可以通过训练多个并行辅助 Head ,以一对多的标签分配方式(如ATSS和Faster RCNN)进行监督,轻松增强端到端检测器中
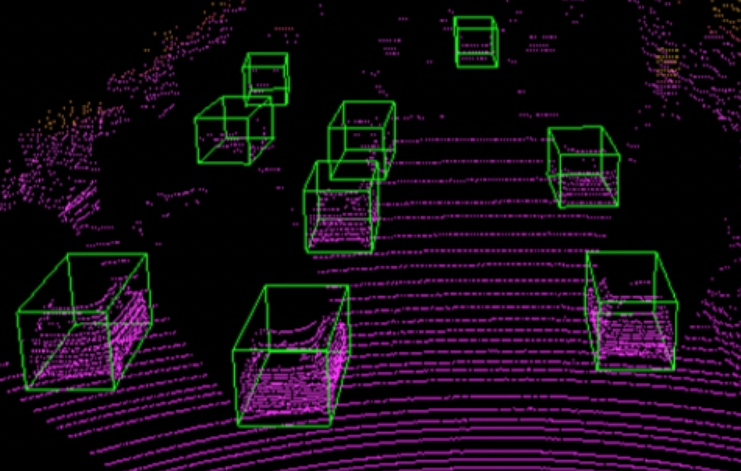
3D点云目标检测的算法汇总,部分重要论文附带代码讲解
AI助力科学研究的现状与展望 人工智能(AI)正加速推动科学研究的变革,在生命科学、物质科学等领域取得显著成果。在生命科学方面,AI已应用于蛋白质结构预测(如AlphaFold)、药物设计等,但目前准确率仍有提升空间。物质科学中,AI帮助发现新型材料、优化化学合成路径,并展现出跨学科迁移学习的潜力。关键技术包括深度学习、强化学习和生成式AI,但面临可解释性、数据质量等挑战。未来趋势将聚焦自动化实验

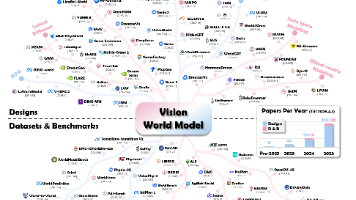
《视觉世界模型研究综述:从观察到认知世界》 本文系统梳理了视觉世界模型(VWM)的研究进展,指出当前领域存在概念不统一、评估标准割裂等问题。作者提出以视觉为核心驱动力的研究框架,将VWM分解为视觉编码、知识学习和可控模拟三大组件,并据此分析现有模型的四类架构设计。研究强调VWM需超越表象模仿,建立包含时空连贯性、物理动力学和因果机制的多层次知识体系。在评估方面,主张从视觉质量扩展到动态合理性和任务
本文提出Scal3R方法,解决大规模3D重建中长视频序列处理难题。针对现有前馈模型因内存限制难以保持长序列重建一致性的问题,创新性地引入神经全局上下文表示(GCM),通过轻量级自适应记忆单元(AMU)高效压缩场景信息。该方法采用测试时训练(TTT)机制,以块为单位更新快速权重,显著提升内存效率。实验表明,在KITTI和Oxford等数据集上,Scal3R实现了领先的位姿估计和3D重建精度,同时保持
d81xˉDIϵϕ∏abc∑abc/ $$E。
