




- @qq_44940689
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Tensorflow2.x配置CUDA与CUDNN深度学习环境(保姆级)文章目录Tensorflow2.x配置CUDA与CUDNN深度学习环境(保姆级)前言一、选择对应的CUDA和CUDNN版本号二、下载对应版本安装包1.下载cuda2.下载cuDNN三、安装1.安装cuda2.配置cuDNN三、验证环境1.查看cuda版本2.conda配置tensorflow环境总结前言看过了很多配置环境的教程
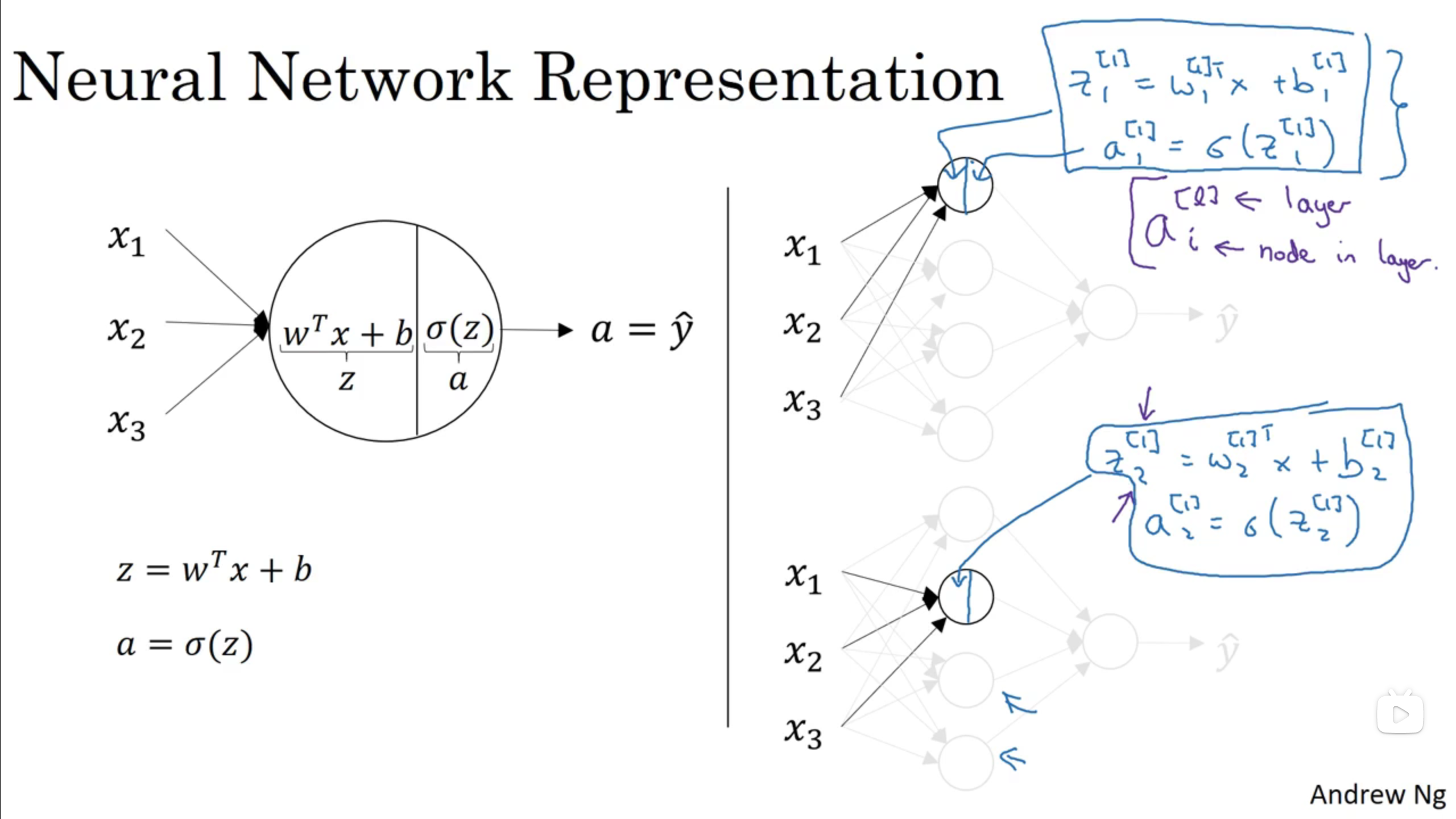
吴恩达深度学习课程一(2)文章目录吴恩达深度学习课程一(2)一、什么是神经网络Neural Network?(1)由逻辑回归到神经网络(2)神经网络的符号规定(3)向量化Vectorization(4)向量化后伪编程Programing二、激活函数Active Function(1)常用的四种激活函数(2)四种激活函数的导数Derivatives三、梯度下降法Gradient Descent(1)
Tensorflow2.x配置CUDA与CUDNN深度学习环境(保姆级)文章目录Tensorflow2.x配置CUDA与CUDNN深度学习环境(保姆级)前言一、选择对应的CUDA和CUDNN版本号二、下载对应版本安装包1.下载cuda2.下载cuDNN三、安装1.安装cuda2.配置cuDNN三、验证环境1.查看cuda版本2.conda配置tensorflow环境总结前言看过了很多配置环境的教程
Tensorflow2.x配置CUDA与CUDNN深度学习环境(保姆级)文章目录Tensorflow2.x配置CUDA与CUDNN深度学习环境(保姆级)前言一、选择对应的CUDA和CUDNN版本号二、下载对应版本安装包1.下载cuda2.下载cuDNN三、安装1.安装cuda2.配置cuDNN三、验证环境1.查看cuda版本2.conda配置tensorflow环境总结前言看过了很多配置环境的教程
话题通信是ROS中使用频率最高的一种通信方式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。话题通信的应用场景也极其广泛。概念以发布订阅的方式实现不同节点之间的数据交互的通信模式作用用于不断更新的、少逻辑处理的数据传输场景。

TF坐标变换,实现不同类型的坐标系之间的转换;rosbag 用于录制ROS节点的执行过程并可以重放该过程;rqt 工具箱,集成了多款图形化的调试工具。了解 TF 坐标变换的概念以及应用场景;能够独立完成TF案例:小乌龟跟随;可以使用 rosbag 命令或编码的形式实现录制与回放;能够熟练使用rqt中的图形化工具。小乌龟跟随实现,该案例是ros中内置案例,终端下键入启动命令键盘可以控制一只乌龟运动,

1.URDFURDF是 Unified Robot Description Format 的首字母缩写,直译为统一(标准化)机器人描述格式,可以以一种 XML 的方式描述机器人的部分结构,比如底盘、摄像头、激光雷达、机械臂以及不同关节的自由度…,该文件可以被 C++ 内置的解释器转换成可视化的机器人模型,是 ROS 中实现机器人仿真的重要组件2.rvizRViz 是 ROS Visualizati

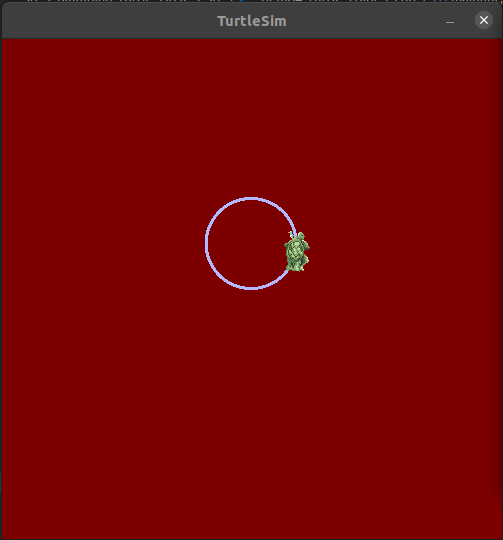
写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址在 这里通过编码实现乌龟运动控制,让小乌龟做圆周运动,如下所示:需求描述: 编码实现乌龟运动控制,让小乌龟做圆周运动。实现分析:实现流程:0、乌龟控制demo分别再终端输入1、话题与消息的获取准备:先启动键盘控制乌龟运动案例通过列出话题,获取话题:再进行消息获取,获取消息类型:结果如下:2、实现发布节点Cpp的实现方案Python的
所以当完成程序下载后LED0和LED1将被点亮,这里先进行工程文件的编译,然后烧录到板子上,编译的过程没有报错。完成之后,我们可以继续cubemx的安装,将下载的压缩包解压出来,点击cubemx的安装包。选择软件的版本,这里选择的是window环境下的6.60版本。选择自己使用的仿真器,这里笔者使用的是ST-Link。如果缺少相应的包,可以进入help下载对应的包库。同理配置PE5也为相同的方式,

Tensorflow2.x配置CUDA与CUDNN深度学习环境(保姆级)文章目录Tensorflow2.x配置CUDA与CUDNN深度学习环境(保姆级)前言一、选择对应的CUDA和CUDNN版本号二、下载对应版本安装包1.下载cuda2.下载cuDNN三、安装1.安装cuda2.配置cuDNN三、验证环境1.查看cuda版本2.conda配置tensorflow环境总结前言看过了很多配置环境的教程