




- @qq_44114055
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
I2C是在进行通信,通信是有从机的,当主机不断驱动SCL时钟时,从机就有义务去改变SDA的电平。所以主机每次循环读取SDA的时候,这个读取到的数据是从机控制的,这个数据也正是从机想要给我们发送的数据;MPU6050是一个6轴姿态传感器,可测量芯片自身X、Y、Z轴的加速度、角速度参数,可以通过这些数据融合,可进一步得到姿态角(或者叫做欧拉角),常应用于平衡车、飞行器等需要检测自身姿态的场景。所以这里

如果当前操作符的优先级小于等于s_opt栈顶操作符的优先级,或者遇到右括号且s_opt栈顶不是左括号,或者表达式遍历结束且s_opt栈不为空,则从s_opt栈中弹出一个操作符进行计算。首先判断s_opt栈是否为空,或者当前操作符的优先级高于s_opt栈顶操作符的优先级,或者遇到左括号 “ ( ” 且当前字符不是右括号 “ ) ”。如果遇到右括号 “)”,则不断从s_opt栈中弹出操作符并进行相应计

1、21世纪是以数字化,网络化,信息化为重要特征的信息时代。2、计算机网络=计算机技术+通信技术(网络)3、网络由若干结点和连接这些结点的链路组成PS:网络中的结点可以是计算机,集线器,交换机或路由器等,通常用一朵云表示一个网络。4、因特网就是世界上最大的互连网络。习惯将连接在因特网上的计算机称为主机。PS:大小写的Internet/internetInternet(因特网):专用名...
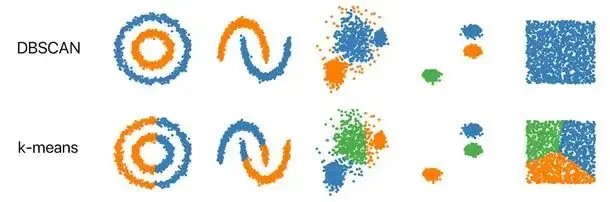
1、开始选取一点,看邻域范围内是否达到MinPts,达到就加入簇,图示标为红,没达到就判断下一个。2、如果在该点的半径范围内至少存在MinPoint点,那么认为所有这些点都属于同一个聚类。优点是DBSCAN算法不需要事先指定聚类的数量,而是通过样本密度来聚合在一起,对于。(比如自动驾驶场景下的点云,含有车、行人、骑行者等,有些目标在空间上还很靠近)及。MinPts:聚类在一起的点的最小数目,超过这
1、21世纪是以数字化,网络化,信息化为重要特征的信息时代。2、计算机网络=计算机技术+通信技术(网络)3、网络由若干结点和连接这些结点的链路组成PS:网络中的结点可以是计算机,集线器,交换机或路由器等,通常用一朵云表示一个网络。4、因特网就是世界上最大的互连网络。习惯将连接在因特网上的计算机称为主机。PS:大小写的Internet/internetInternet(因特网):专用名...
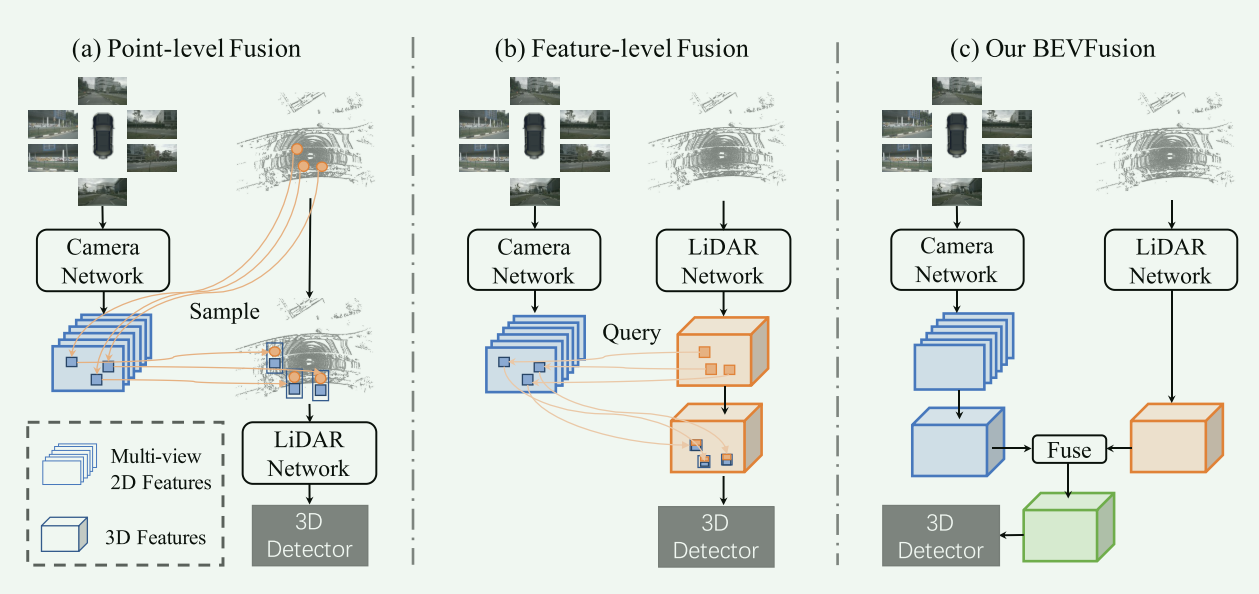
将两种模态的中间特征通过内外参矩阵,拼接投影,融合出完整的特征,传递的是query,输入点云,通过一个点云网络,得到初始位置,初始位置去图像上采样特征,采样完再拼接到原始点云特征上。从点出发,从点云中采样一些点,然后根据相机的内参和外参矩阵,投影到图像上,采样到图像特征,然后拼接回点云,利用融合后的特征经过点云处理模块去做3D检测。执行训练,第一条nuimage的训练可以忽略,直接git上下载模型
51单片机实验LED流水灯 定时器0方式1 中断实现实验目的:P1口接8个发光管,实现半秒依次闪烁,从上到下,再从下到上,要求使用定时器0工作方式1,中断实现。#include <at89x52.h>code unsigned char out[14]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x40,0x20,0x10,0x08,0x04,0
unsigned 类型值的含义是0U-unsigned 类型值。值小者减值大者会得到一个负数,然而unsigned类型表示的值的范围是[0, 232-1],即[0, 4294967295]。PS:unsigned int 16、 0~65535 ;32、 0~42亿但是却在 int 型表示值(补码)的范围内,所以把这个int类型的值的补码形式理解为相同形式的unsigned类型。...