




- @qq_42102546
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
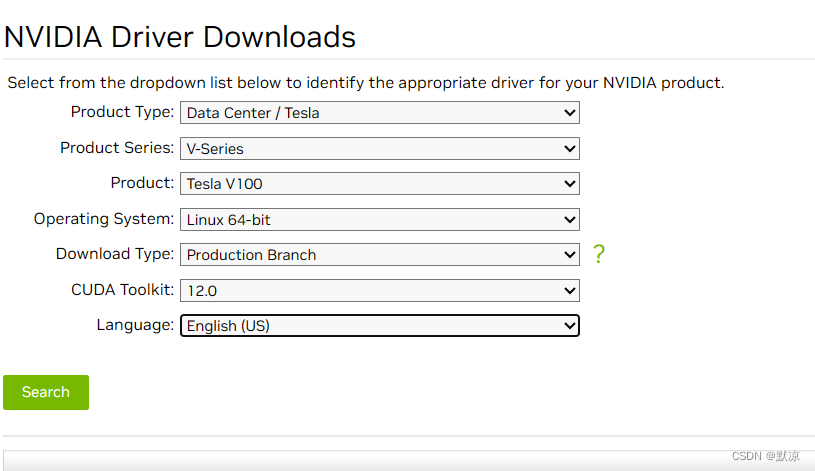
根据硬件选择,我这里是 ubuntu 服务器,显卡是v100输入用户名,密码sudo su密码重启 reboot驱动安装成功。
图像滤波增强处理实质上就是运用滤波技术来增强图像的某些空间频率特征,以改善地物目标与领域或背景之间的灰度反差。 遥感系统成像过程中可能产生的”模糊”作用,常使遥感图像上某些用户感兴趣的线性形迹、纹理与地物边界等信息显示得不够清晰, 不易识别。需要通过采用领域处理方法来分析、比较和调整像元与其周围相邻像元间的对比度关系,图像才能得到增加,也就是说 需要采用滤波增加技术处理。import cv2
前提知识:标准差、方差标准差标准差=方差开根号概念:标准差,中文环境中又常称均方差,在概率统计中最常使用作为统计分布程度上的测量。标准差是方差的算术平方根。标准差能反映一个数据集的离散程度。平均数相同的两组数据,标准差未必相同。方差若x1,x2,x3…xn的平均数为M,则方差公式可表示为:例1 两人的5次测验成绩如下:X: 50,100,100,60,50 ,平均成绩为E(X )=72;Y: 73
代码】python计算日出、中午、日落。
import cv2import numpy as npdef cv_show(neme, img):cv2.imshow(neme, img)# 必要参数:名字和变量名cv2.waitKey(0)# 括号中0=任意键终止,单位为毫秒级别cv2.destroyAllWindows()# 关闭所有窗口--图片# 可以读取一张图像,或者生成一个矩阵img = np.zeros((512, 512, 3
打印目前所有颜色空间转换(我试了一下,已经存在346种了)flags = [i for i in dir(cv2) if i.startswith('COLOR_')]、print(len(flags))颜色空间转换使用函数cv2.cvtColor(input_image ,flag),flag是转换类型灰度图 BGR↔Graycv2.COLOR_BGR2GRAYHSV 颜色空间 BGR↔HSVc
根据硬件选择,我这里是 ubuntu 服务器,显卡是v100输入用户名,密码sudo su密码重启 reboot驱动安装成功。
线性回归# 利用LinearRegression实现线性回归import numpy as npimport sklearn.linear_model as lm# 线性模型import sklearn.metrics as sm# 模型性能评价模块import matplotlib.pyplot as mptrain_x = np.array([[0.5], [0.6], [0.8], [1.1
基础命令首先,先看一下教学视频,这里推荐 网易云课堂程序员艾叔的教学视频课堂网址:(https://study.163.com/course/courseMain.htm?courseId=1548004).cd ~返回当前用户的根目录./代表当前目录…/代表上一级目录mv 原文件名重命名后的文件名cp test/ haha复制 读取test文件全部 复制到 haha方法一cp -r test/
根据硬件选择,我这里是 ubuntu 服务器,显卡是v100输入用户名,密码sudo su密码重启 reboot驱动安装成功。