




- @qq_41880787
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
上面两个图第一个我用的测试APPID,第二个我用的的是自己创建申请的APPID,直白来讲就是没有上传按键说明它自己也不知道上传到哪,因为你没有把相当于私有云钥匙的账号给它,可以直接在右上角详情APPID中直接修改为你申请到的APPID(微信开发者平台申请和查看自己APP ID)。不需要下面这些操作:不过原因是对的!!!如果上面的方法无法解决你的问题,那么请:1.将小程序中的 project.con
!!!温馨提示修改文件路径 😃一堆报错Consolidate compiler generated dependencies of target optical_flow[ 25%] Building CXX object CMakeFiles/optical_flow.dir/optical_flow.cpp.o[ 50%] Linking CXX executable optical_flo

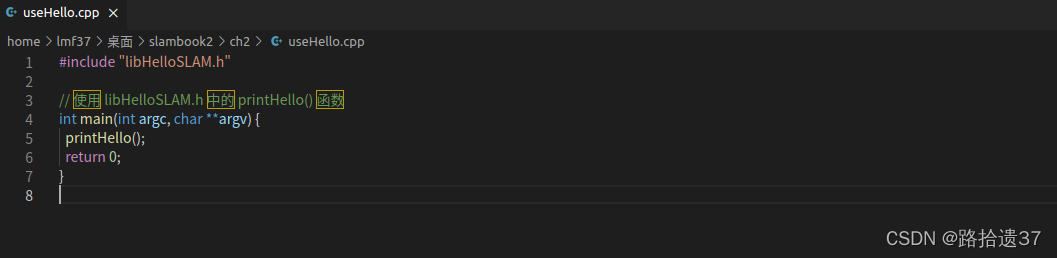
目录1. vim基础保存退出命令i 切换插入esc 退出编译模式输入 :(注意`:`要输入2. 截图快捷键(小kills)3.编译helloslam程序3.1 使用g++命令编译4. 使用cmake编译4.1 编写 cmake 文件4.2调用cmke命令新建工程4.3g++与cmake编译区别4.4使用库文件来实现hello4.5 使用库文件5. 使用IDE5.1新建工程5.2添加相应代码-使用库
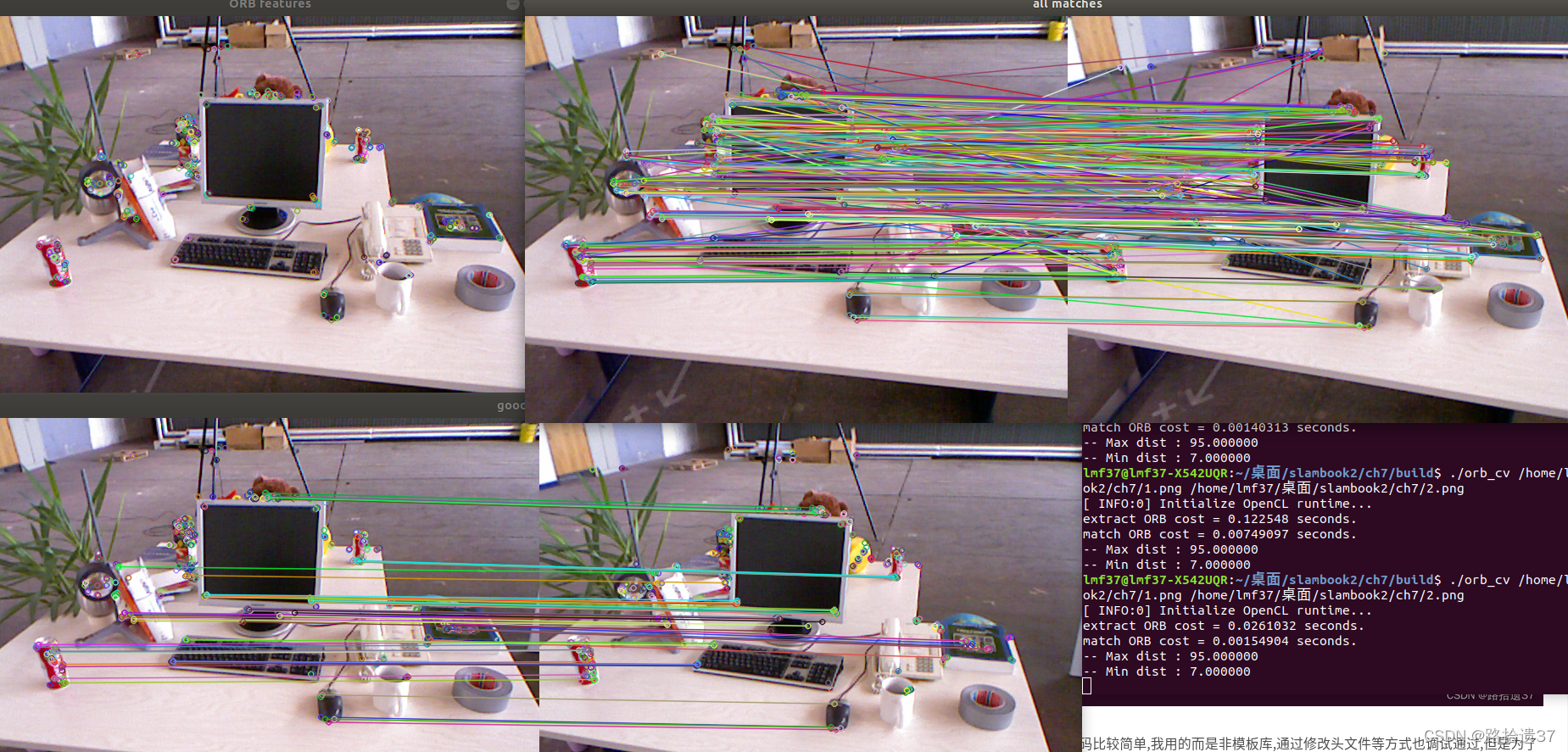
文章目录错误:这里需要重新安装Sophus模板库,前面chp4代码比较简单,我用的而是非模板库,通过修改头文件等方式也调试通过,但是为了之后章节调试的方便,我觉得定重新改用模板版库,安装之前记得将usr Sophus文件夹删除如下:sudo rm -rf /usr/local/include/sophussudo rm -rf /usr/local/lib/libSophus.solocate S
文章目录11.1 理论部分11.2 实践部分11.2.111.2.2调试bug参考资料11.1 理论部分可参考博客:视觉SLAM十四讲:回环检测-知识点+代码11.2 实践部分11.2.111.2.2调试bug安装下载 DBoW3库在进行编译程序前,先需要安装DBoW,第二版的安装文件下载链接如下所示:DBow3下载完成后,安装方法很简单,将文件存放在你想存放的文件夹里面,进入DBoW-maste

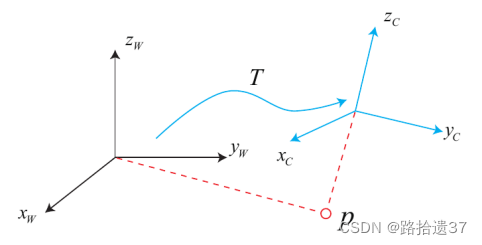
文章目录3.1 旋转矩阵3.1.1点与坐标系3.1.2 坐标系中的欧式变换3.1.3 变换矩阵与齐次坐标3.2 Eigen库的使用3.3 旋转向量和欧拉角3.3.1 旋转向量3.3.2欧拉角3.4四元数3.4.1 四元数的定义3.4.2 四元数的运算3.4.3 用四元数表示旋转3.4.4四元数到旋转矩阵的转换3.5 补充小萝卜的例子解释,坐标在不同坐标系转换参考博客3.1 旋转矩阵3.1.1点与坐
失败原因是百度为第三方,在这里你使用了第三方接口,https://aip.baidubce.com 不在 request 合法域名列表中,所以你写的项目自然没法链接到这个接口,需要把相关的https接口配置上。具体操作如下:登陆微信公众平台后台——开发——开发设置——配置服务器域名–把相关的域名配置上去就可以访问了。刷新调试就可以。成功展示一张图片,嘿嘿!...
文章目录1.总体功能概述2.功能介绍2.1基本操作2.2图像类型变换2.3图形几何变换2.4图像变换2.5图像添加噪声2.6图像复原2.7图像增强2.8图像分割2.9图像编码2.10二值形态学处理2.11小波图像处理2.12数字图像处理应用3. 项目总结1.总体功能概述本图像处理软件总的包括基本操作、图形类型变换、图形几何变化、图像变换、图像添加噪声、图像复原、图像增强、图像分割、图像编码、二值形
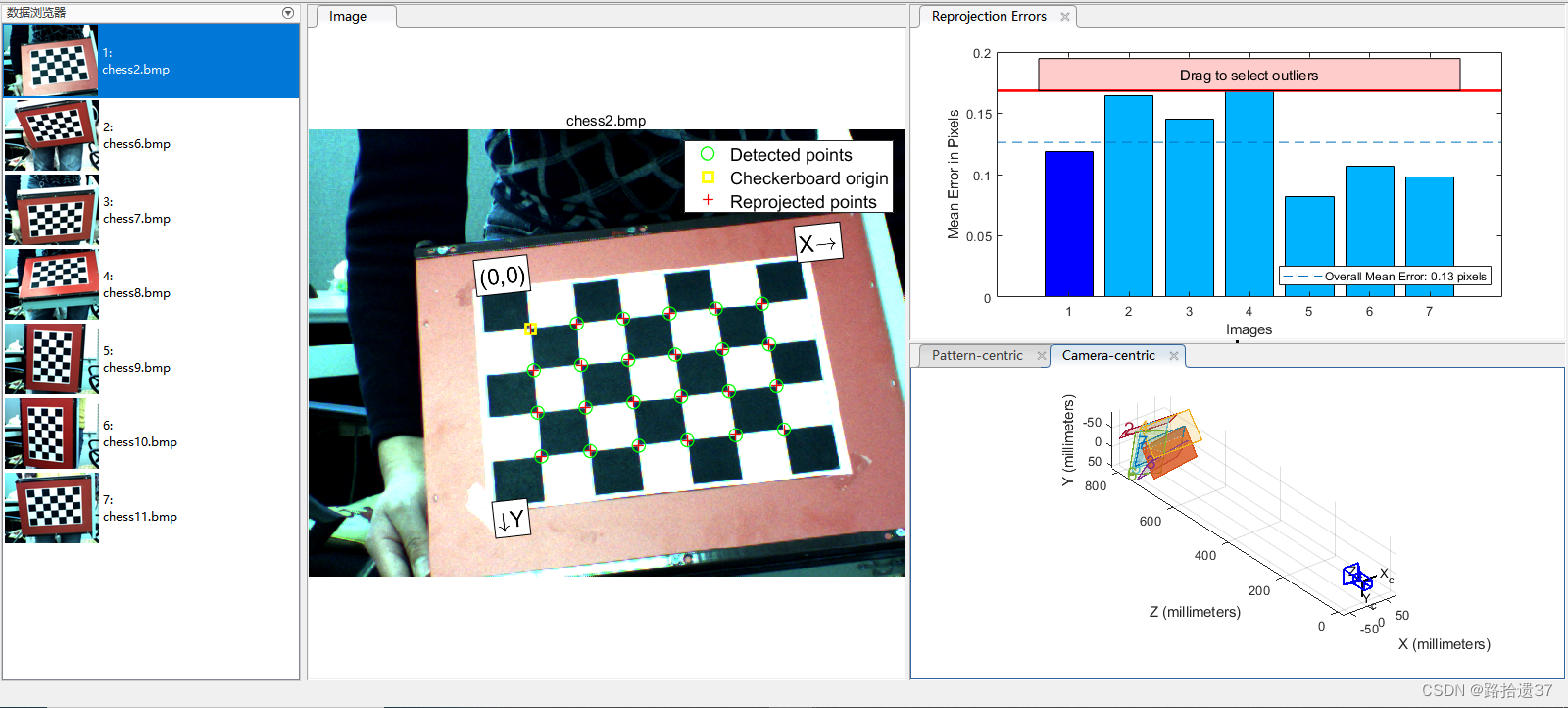
文章目录1. 使用 Matlab 进行相机标定1.1 原理推导1.2 标定图资源下载 (不需要积分)1.3 使用matlab 工具箱camera calibrator 流程2. 使用 OpenCV 进行相机标定参考资料1. 使用 Matlab 进行相机标定1.1 原理推导相机标定原理推导可参考:一文详解相机标定算法原理 推导过程很详细1.2 标定图资源下载 (不需要积分)资源里提供了14张图片1.
第八届全国光电设计赛题——基于智能手机的苹果糖度无损测量分析先看赛题说真的,由于疫情的特殊影响,这个比赛最终能不能进行下去还是个未知数,有个有趣的事情,我突然发现这个比赛官网挂了,不过我们小team 还是准备艰难进行下去,抛去外因,这个赛题趣味也是十足。1.赛题分析(1)要求利用手机的成像功能,所以得到的光信号必须要通过手机的CMOS传感器来接收。(2)要求测量数据的处理、显示工作需全...