
写文章




- @qq_41694024
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
视觉SLAM③:三维空间的刚体运动
主要目标1.理解三维空间的刚体运动描述方式:旋转矩阵、变换矩阵、四元数和欧拉角。2.掌握Eigen库的矩阵、几何模块的使用方法。
Lecture7:随机梯度下降算法问题及解决、dropout正则化、学习率的选择、迁移学习
介绍了随机梯度下降算法问题及解决、dropout正则化、学习率的选择以及迁移学习
YOLO V8训练自己的数据集并测试
YOLO V8训练自己的数据集并测试

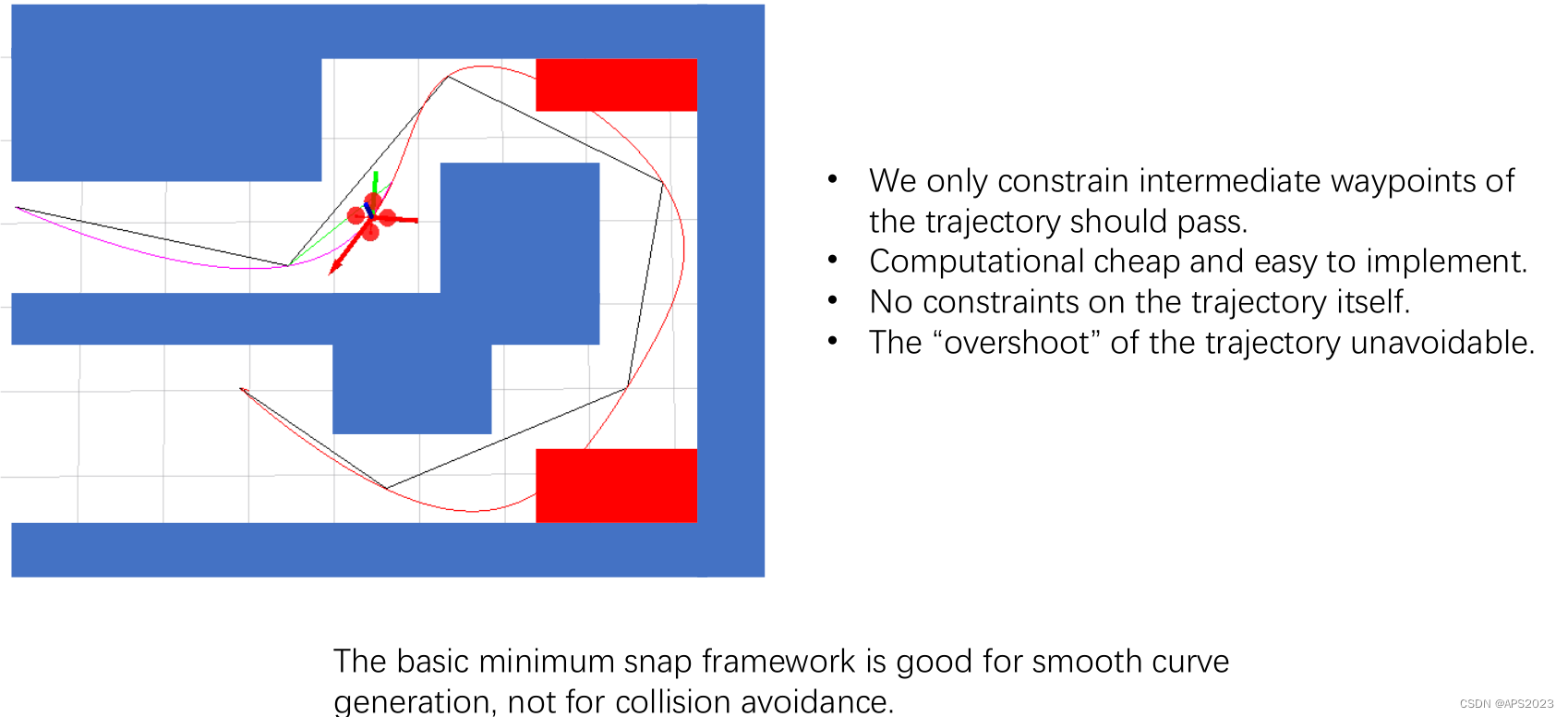
移动机器人路径规划(六)--- 软约束、硬约束下的轨迹优化/生成SOFT AND HARD CONSTRAINED TRAJECTORY OPTIMIZATION
移动机器人路径规划(六)--- 软约束、硬约束下的轨迹优化/生成SOFT AND HARD CONSTRAINED TRAJECTORY OPTIMIZATION
视觉SLAM⑪----回环检测
1.理解回环检测的必要性。2.掌握基于词袋的外观式回环检测。
视觉SLAM⑫----建图(未完)
1.理解单目SLAM中稠密深度估计的原理2.通过实验了解单目稠密重建的过程3.了解几种RGB-D重建中的地图形式
机器学习入门(一)基本概念介绍
机器学习(1):基本概念介绍
机器学习入门(七)神经网络--代价函数、前向反向传播算法及问题
神经网络--代价函数、前向反向传播算法及问题
机器学习入门(二)一元线性回归
机器学习入门(二)一元线性回归
ORB-SLAM2 --- LoopClosing::DetectLoop 函数
经过一系列筛选操作筛选出当前帧mpCurrentKF的闭环候选关键帧,并将闭环候选关键帧存储在容器mvpEnoughConsistentCandidates中供其他函数使用,更新连续组关系mvConsistentGroups。