




- @qq_41572755
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在ros环境下部署yolov8-seg,进行实例分割检测,借助ncnn框架。
使用ncnn框架部署yolov8-seg,外加qt进行界面可视化操作,用于图片和视频实例分割推理。

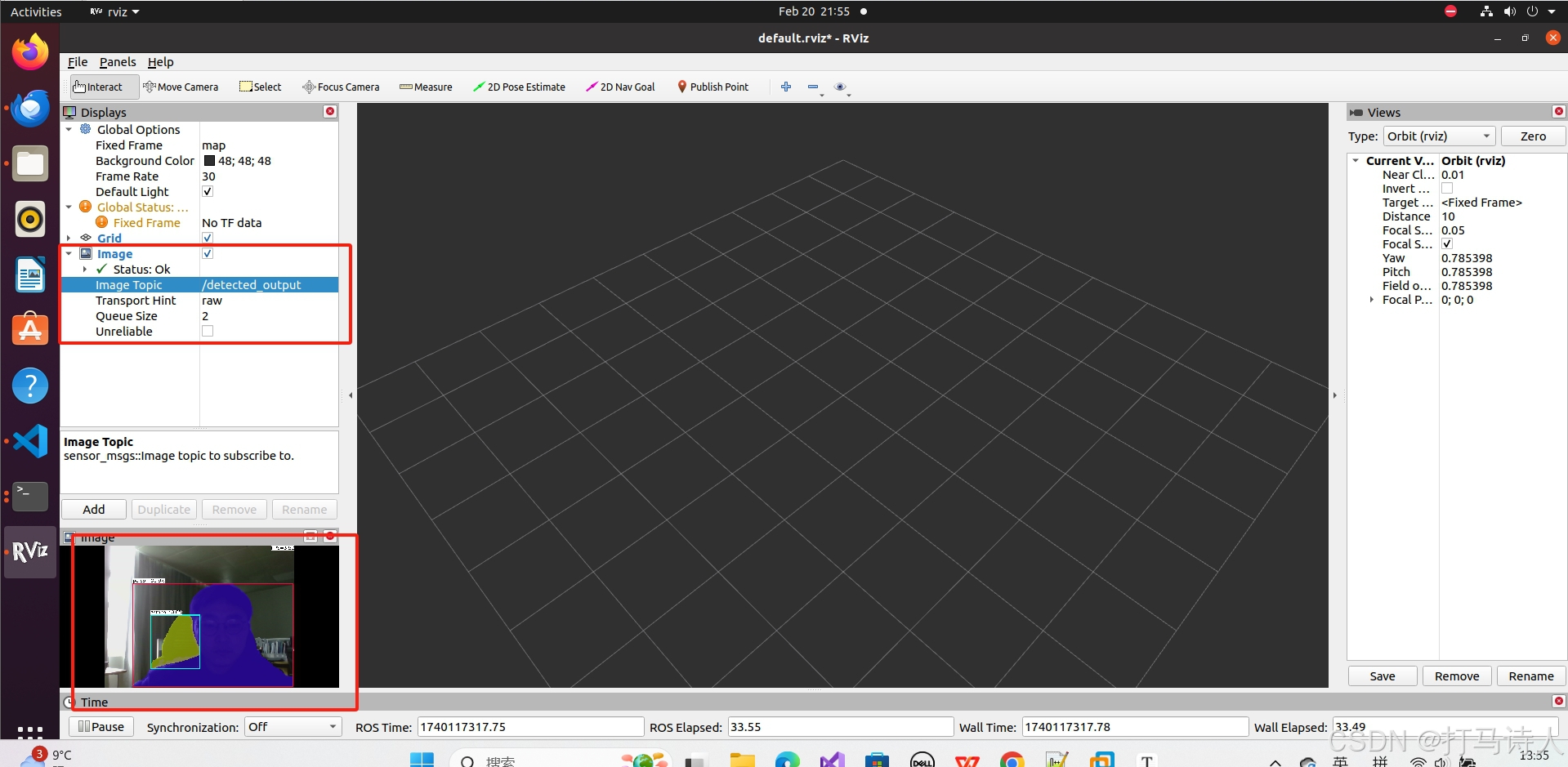
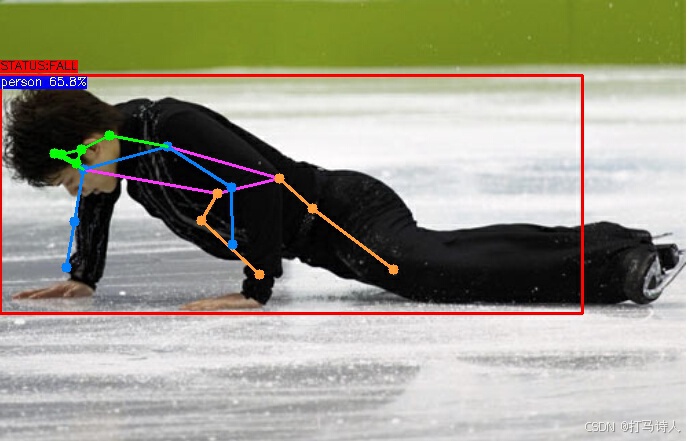
使用yolov8-pose进行人体关键点检测,通过计算人体各关键点关系进行人体摔倒检测(ncnn框架实现)
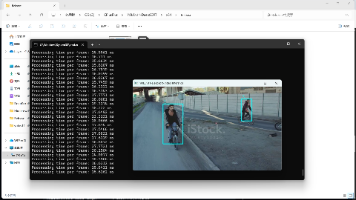
本文介绍了基于YOLOv11和OCSort的多类别目标跟踪项目,使用ncnn框架C++实现。相比DeepSort,OCSort算法在速度、轻量化、遮挡处理等方面更具优势,支持多类别跟踪且无需额外训练模型。项目提供了环境配置和编译指南,展示了20-30FPS的实际推理效果。作者强调代码开源性质,谴责商业盗用行为。项目参考了OC_SORT和YOLOv11_deepsort_ncnn等开源工作,适用于需
本文介绍了一个基于YOLOv11和OCSort的多类别目标跟踪项目,使用TensorRT框架C++实现。相比DeepSort和ByteTrack,OCSort算法在遮挡处理、速度和轻量级部署方面更具优势。项目包含环境配置指南和推理步骤,支持视频推理及结果保存。测试显示推理速度可达200FPS左右。作者提供了相关参考项目链接,并强调代码开源性质,反对商业倒卖行为。该实现将YOLOv11的前后处理移至
本文介绍了基于YOLOv11和DeepSort算法的行人目标跟踪系统,使用NCNN框架在C++环境下实现。项目通过YOLOv11 nano版本进行目标检测,结合改进的DeepSort算法实现跟踪,重点解决了NCNN平台部署的难点。作者详细说明了环境配置(VS2019、ncnn、OpenCV)和推理部署步骤,并分析了DeepSort算法在复杂动作场景下ID易切换的局限性。项目支持视频和摄像头输入,默
本项目实现了YOLOv11目标检测模型从PyTorch(.pt)到TensorRT(.engine)的量化转换,包含fp16和int8两种精度。首先将预训练模型转换为ONNX格式,支持固定/动态batch输入;然后通过训练后量化(PTQ)方法生成int8引擎,使用COCO128数据进行标定;最后提供C++推理框架验证速度。项目在Jetson Orin NX上测试,包含完整模型转换流程和代码,显著提
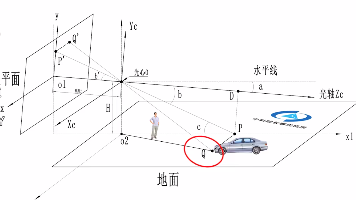
本项目基于YOLOv11和OCSort算法实现多类别目标跟踪,并集成单目相机测距功能。采用TensorRT框架加速推理,C++实现,适用于交通场景下的目标检测、跟踪与距离估计。系统通过像素坐标反投影和地面平面约束计算目标距离,结合相机内参、外参及安装高度进行几何补偿。相比DeepSort和ByteTrack,OCSort算法在遮挡处理、轻量化和跟踪稳定性方面表现更优。项目提供完整的相机标定方法和参
创建本仓库的初衷是为了想在ROS中使用语音合成,播报目标检测的检测结果或者进行语音交互使用。但是在网上搜索一圈发现,基本上没有免费离线的TTS并且还需要注册和联网(说的就是你,科大讯飞)。本着能白嫖就白嫖的原则,便在github搜索一番,发现一个很棒的离线的TTS仓库SummerTTS,还是用C++写的,看到这个仓库之后,真的是两眼放光,立马克隆下来研究一番。十分建议在使用本仓库之前,仔细观看原仓
本文介绍了基于YOLOv11和OCSort的多类别目标跟踪项目,使用ncnn框架C++实现。相比DeepSort,OCSort算法在速度、轻量化、遮挡处理等方面更具优势,支持多类别跟踪且无需额外训练模型。项目提供了环境配置和编译指南,展示了20-30FPS的实际推理效果。作者强调代码开源性质,谴责商业盗用行为。项目参考了OC_SORT和YOLOv11_deepsort_ncnn等开源工作,适用于需