




- @qq_40725313
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
众所周知,开发环境的搭建非常耗费时间,而且还要关注到项目对引用及依赖的库文件的版本问题。尤其是对于一些已经交付的项目的二次开发,开发人员要么配置之前的开发环境,要么把相关包文件升级到最新版本并且发布到生产环境。目的:熟练使用docker进行code-server的部署,能通过网页打开vscode界面进行编程,并能够提供给多用户使用。code-server是一款服务端的vscode,可以在浏览器中使

视觉目标跟踪是计算机视觉中的一大难题,需在连续视频帧中通过边界框持续识别和定位目标对象,面临遮挡、光线变化、快速运动和运动模糊等挑战,且诸多实际应用要求实时且准确的预测。基于图像的视觉伺服控制虽无需依赖目标精确模型且鲁棒性较强,但面临复杂目标形状、非合作目标运动状态的影响,存在图像特征交互矩阵难获精确解析形式、控制系统收敛范围有限、视场限制等问题。A3CTD在跟踪阶段利用学习到的状态价值函数评估自
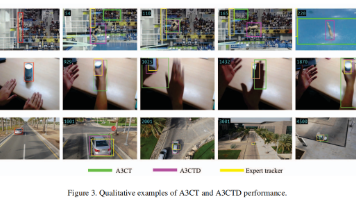
视觉目标跟踪是计算机视觉中的一大难题,需在连续视频帧中通过边界框持续识别和定位目标对象,面临遮挡、光线变化、快速运动和运动模糊等挑战,且诸多实际应用要求实时且准确的预测。基于图像的视觉伺服控制虽无需依赖目标精确模型且鲁棒性较强,但面临复杂目标形状、非合作目标运动状态的影响,存在图像特征交互矩阵难获精确解析形式、控制系统收敛范围有限、视场限制等问题。A3CTD在跟踪阶段利用学习到的状态价值函数评估自
该数据集专为军用飞机的物体检测而设计,涵盖 88 种不同的军用飞机类型。某些机型与其变体合并为一类,因为它们的机身或外部特征仅略有不同,因此难以区分——尤其是在只有部分飞机可见的情况下。!

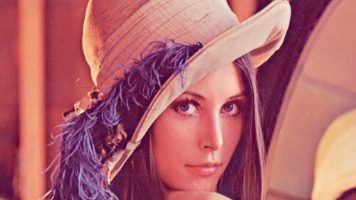
HSV色彩空间:HSV是从心理学角度提出的,它包括色调、饱和度和亮度三要素。其中,色调是指光的颜色,与混合光谱的主要光波长有关;饱和度是指颜色深浅程度或相对纯净度;亮度反映的是人眼感受到的光的明暗程度。YCrCb:Y代表亮度,Cr和Cb保存色度信息,其中Cr表示红色分量信息,Cb表示蓝色分量信息。平常大家看到的lena.png是这样的。图像通道的拆分和合并 RGB。示例图像 lena.png。逻辑
现在是最好的时代,没有AI的话我都不知道怎么编程,现在只需要把你的想法告诉大模型,他写出来的代码比我自己写又快又好,只需要在AI代码上做进一步的测试和优化即可,AI可以说在很大程度上加速了写代码这个过程,写代码其实就是把想法转换成机器能够理解的语言。在AI的基础上,擅用AI,然后在此基础上学习更多更深入的知识,对技术有自己的理解。有的创业,有的去国外打工(现在国外打工也不是好路子),有的早早转行,

这是关于 Ollama 运行时的报错信息,实体信息为:提示文件 “C:\Users\Administrator\AppData\Local\Programs\Ollama\unins000.msi” 缺失,建议修正问题或获取该程序的新副本。Ollama 是用于在本地运行大语言模型的工具,出现此报错可能影响其相关卸载、修复等操作,可尝试重新安装 Ollama 来解决文件缺失问题。重新安装ollama
中文网站学习react native的优势:学习成本低,只要掌握JS和React即可;开发成本低,可以生成Android和ios上的app。react native入门到实战为什么选择React-native。

该数据集专为军用飞机的物体检测而设计,涵盖 88 种不同的军用飞机类型。某些机型与其变体合并为一类,因为它们的机身或外部特征仅略有不同,因此难以区分——尤其是在只有部分飞机可见的情况下。!
输入fonts,快速定位到字体的设置,点击Edit,这里主要是可以编辑字体的大小。右键项目>Delete>一般不勾选(勾选的话会把项目从硬盘上彻底删除)F5 单步执行,但会进入方法,包括自定义方法和jdk源码的方法。F7 跳出当前正在Debug的方法,但不能跳出main方法。F8 执行到下一个断点,如果没有断点,则程序执行完毕。F6 单步执行,遇到方法会将方法当做一条语句执行。依旧是Window-
