




- @qq_40640910
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
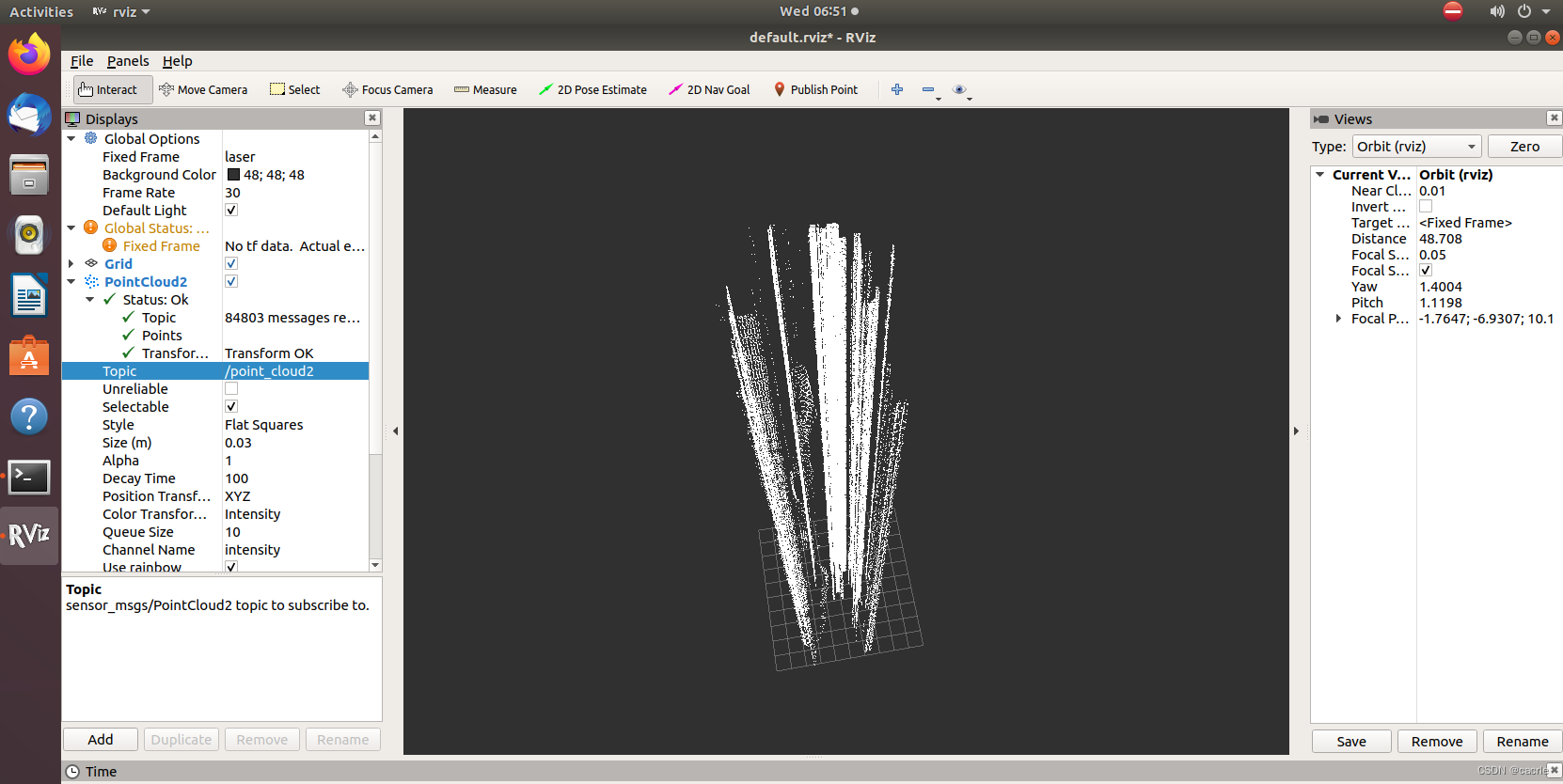
在ROS应用一般会用到发布者和订阅者,若只接收传感器数据,则只实现订阅者就行,但有时需要订阅者部分做简单数据处理后,再发布出去,供其他订阅者接收。以上场景涉及一个中间文件,即既是订阅者,也是发布者的文件,本文查阅现有网络资源,复现现有实现方法,在树莓派中利用二维雷达传感器数据实现数据的订阅,做三维处理后发布,并在上位机虚拟机显示三维点云。
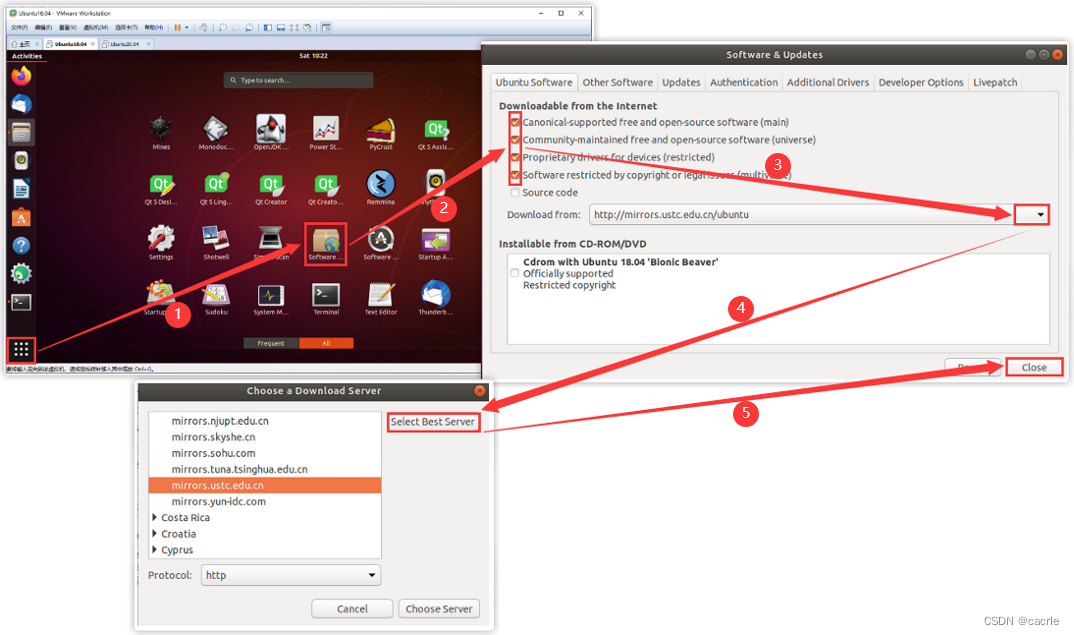
笔者研究生的课题是关于多传感器数据融合的,传感器数据获取一般是通过Arduino或者树莓派获取,本文通过树莓派获取数据,硬件驱动代码是基于ROS开发的,ROS是Robot Operate System(机器人操作系统),可以驱动硬件获取数据,并能进行数据处理。本文为了实现传感器数据的获取和处理,进行ROS系统的安装和简单开发。本文介绍了ROS安装,ROS创建工作空间和功能包,ROS中执行C++文件
RTK可以说是测绘工作的核心,RTK技术的运用极为广泛,比如在各种控制测量、地形测图、工程选线及工程放样中的应用等,它提高了作业效率和作业精度,这是其他常规仪器无法比拟的。笔者本科专业是测绘工程,当时并未太深入理解RTK技术的优越性,导致在研究生时使用该技术也难免会感到有些畏难感,达到研究生这个层次后,对于技术使用的总结有了很强的意识,本次由于有同学向我请教RTK使用方法,是一个总结RTK技术的机

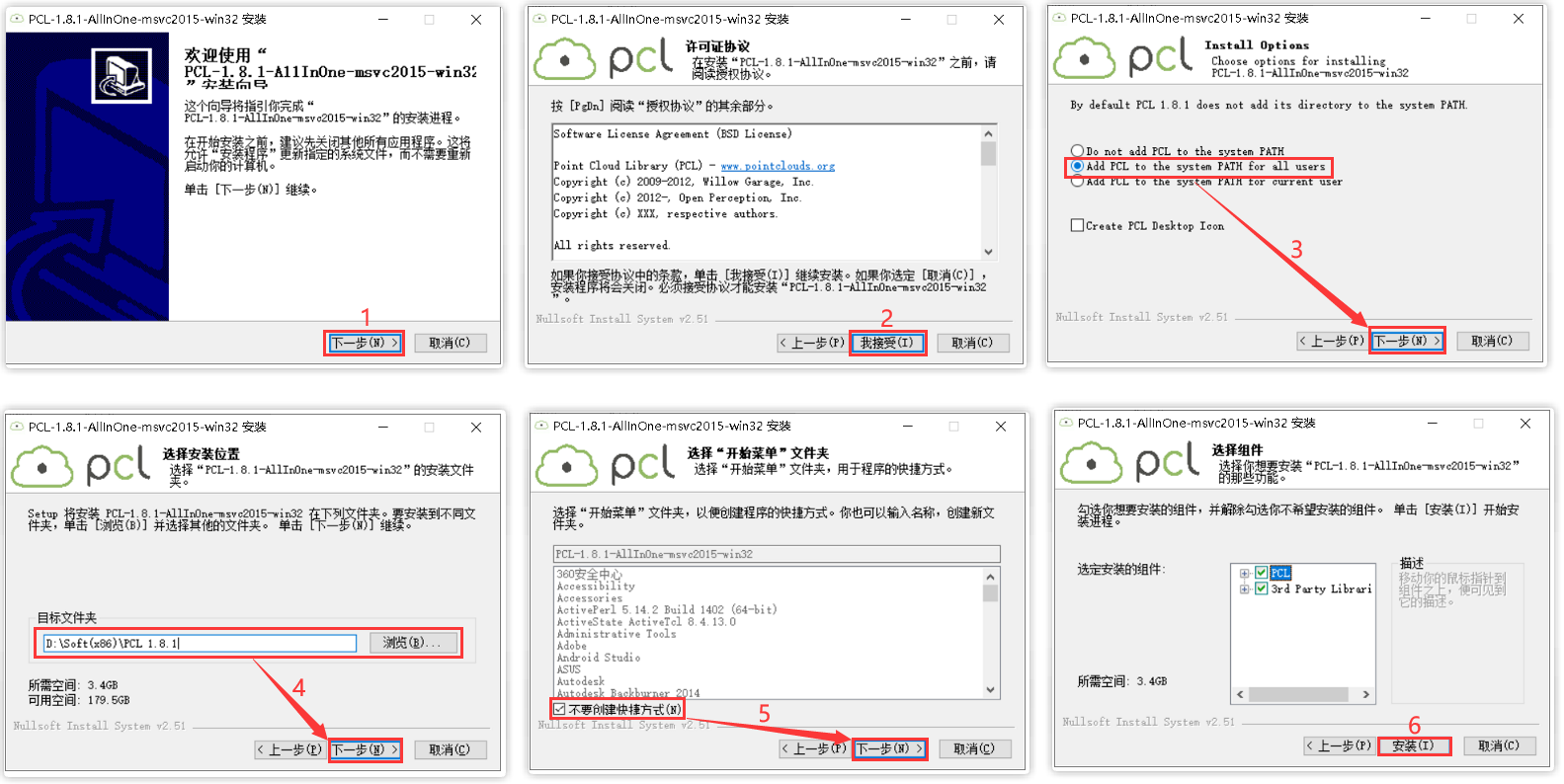
因笔者课题涉及点云处理,需要通过PCL进行点云数据分析处理,查阅现有网络资料,实现了VisualStudio2015(x86)配置PCL1.8.1点云库,本文记录实现配置的过程。
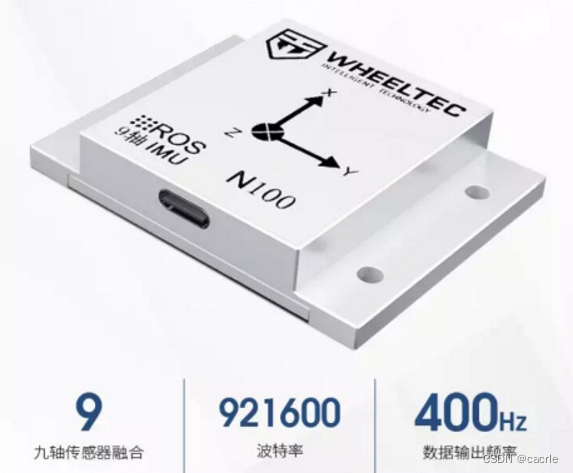
之前采用的惯导模块为ICM20948 IMU模块(模块精度0.06°/s,即216'/s),这款IMU用于某个需要一直旋转Z轴的实验,匀速旋转IMU,对姿态数据采集1min,经实验,模型在Z轴旋转时,也即平面旋转过程,Z轴旋转数据相邻两帧变化最大达到5.5°,误差非常大,导致实验一直出现问题。现换高精度惯导模块WHEELTEC N100,以下说明WHEELTEC N100惯导模块在ROS环境下如何
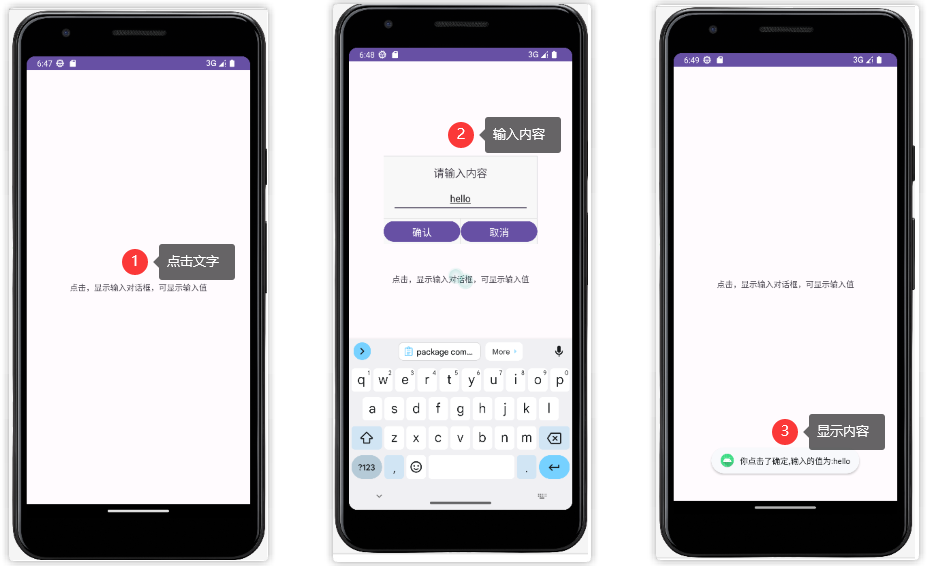
笔者研究的课题涉及到安卓软件开发,在开发过程中,发现普通的显示消息对话框一般可以调用android自带包实现,而要通过文本框输入交互,则无法轻易实现。在查阅网络资料后,实现了自定义输入文本对话框的功能,本文记录实现自定义输入文本对话框的过程。
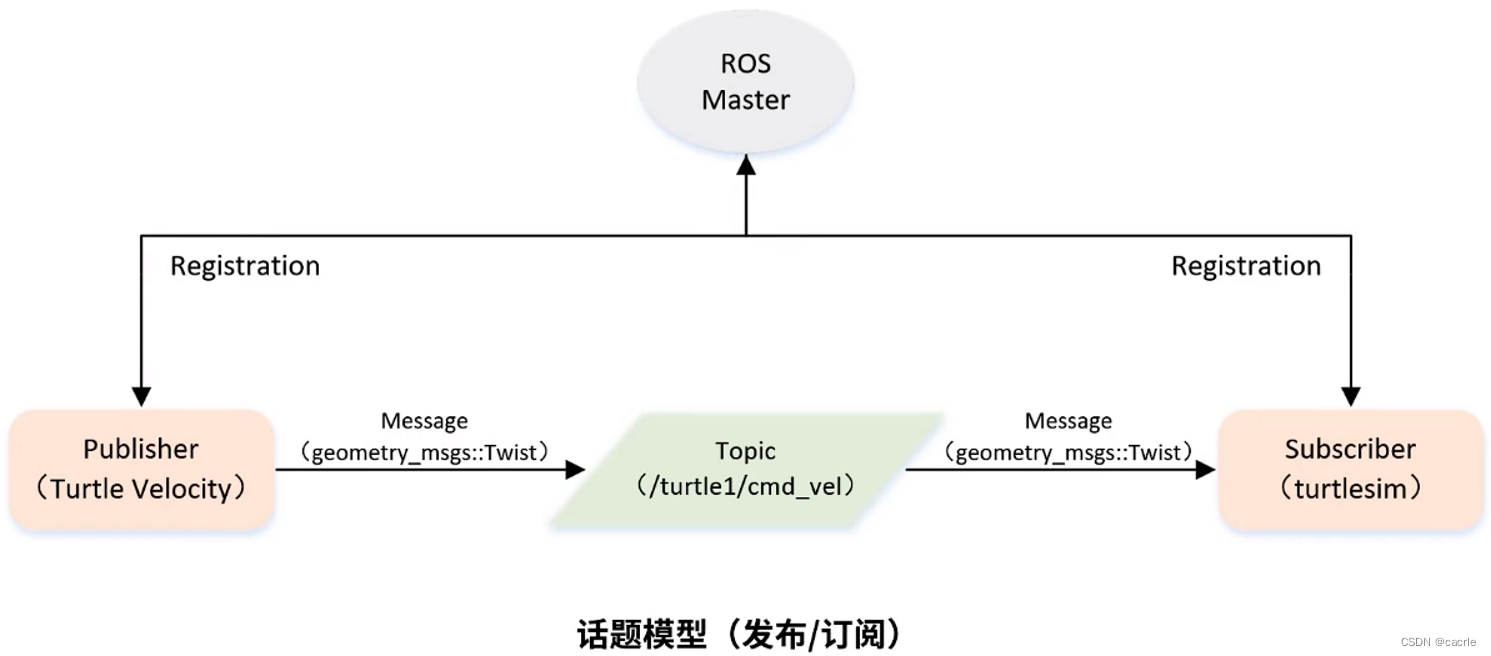
笔者因研究课题涉及ROS开发,学习了古月居出品的ROS入门21讲,为巩固话题通信(用于不断更新、少逻辑处理的数据处理场景)知识,本文将ROS的发布者、订阅者和话题消息三讲内容进行总结。
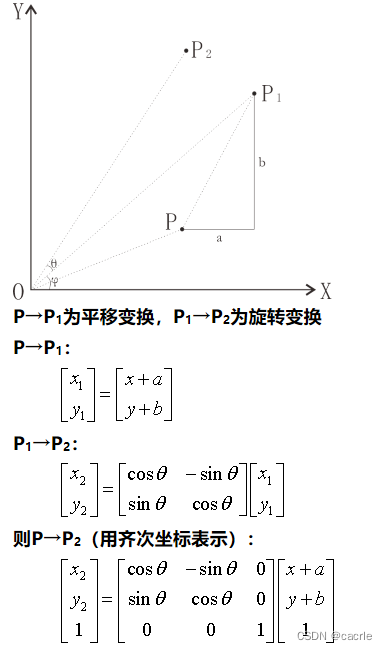
要描述某一物体在现实场景的位置,通常以三维空间坐标系下的坐标进行说明,当物体位置或自身进行变化时,可以用放射变换说明物体的变化情况。仿射变换中的基本变换包括平移、旋转、缩放、剪切。本文研究的物体为刚体,涉及的变换为平移和旋转,下文将以平移和旋转变换分别说明二维平面和三维空间坐标(系)如何进行空间变换。以下规定D为平移矩阵,R为旋转矩阵,T为变换矩阵,矩阵变换从右往左进行左乘,,坐标系符合右手定则,
CloudCompare是一款优秀的开源点云处理软件,在研究点云的过程中,除了利用该软件现有的功能,在基于开源情况下,可以对该软件进行二次开发,以适应未来特定的需求。要对CloudCompare进行二次开发(在源代码基础上添加新功能或者开发插件),必须先能实现对该软件的编译,后续二次开发才能顺利进行。
本文通过AndroidStudio开发手机应用软件,实现蓝牙连接功能,并且能发送消息给HC-05蓝牙,也能接收HC-05回传的消息。