写文章




- @qq_39784672
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
粒子群算法(PSO)优化RBF神经网络实践
PSO-RBFN实践

【实战】K210训练与部署YOLO目标检测模型
K210训练与部署YOLOv3目标检测模型文章目录K210训练与部署YOLOv3目标检测模型材料准备项目目标实验步骤一、数据集制作1. 准备数据集二、使用步骤1.引入库2.读入数据总结材料准备K210(Maix Bit)MaixPy IDEMx-yolov3TF卡及读卡器项目目标使用部署在K210上的yolov3模型完成水面漂浮垃圾的检测与识别任务Mx-yolov3能够简化并降低你训练Maix模型
RBF神经网络学习及实践
RBF神经网络学习及实践
opencv环境配置:error while loading shared libraries: libopencv_xxx.so.x
opencv环境配置:error while loading shared libraries: libopencv_xxx.so.x环境描述:树莓派4b+ubuntu-mate20.04+opencv4.5.0+qtcreator问题描述:在.pro文件中导入opencv库路径后,构建并运行程序报错:error while loading shared libraries: libopencv_
代理模型学习记录
代理模型初步学习记录
RBF神经网络学习及实践
RBF神经网络学习及实践
使用Everything分析和清理C盘
Everything清理C盘
【Python小demo】JOJO替身面板生成
使用python“仿制”JOJO替身面板
CGAL的安装与在VS中的配置
CGAL5.4.1+VS2022+QT5.13.1的安装与配置
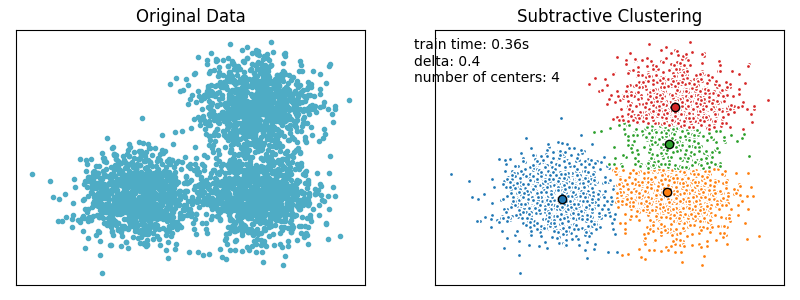
减法聚类(Subtractive Clustering)算法实践
减法聚类(Subtractive Clustering)算法学习实践