写文章




- @qq_37648371
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
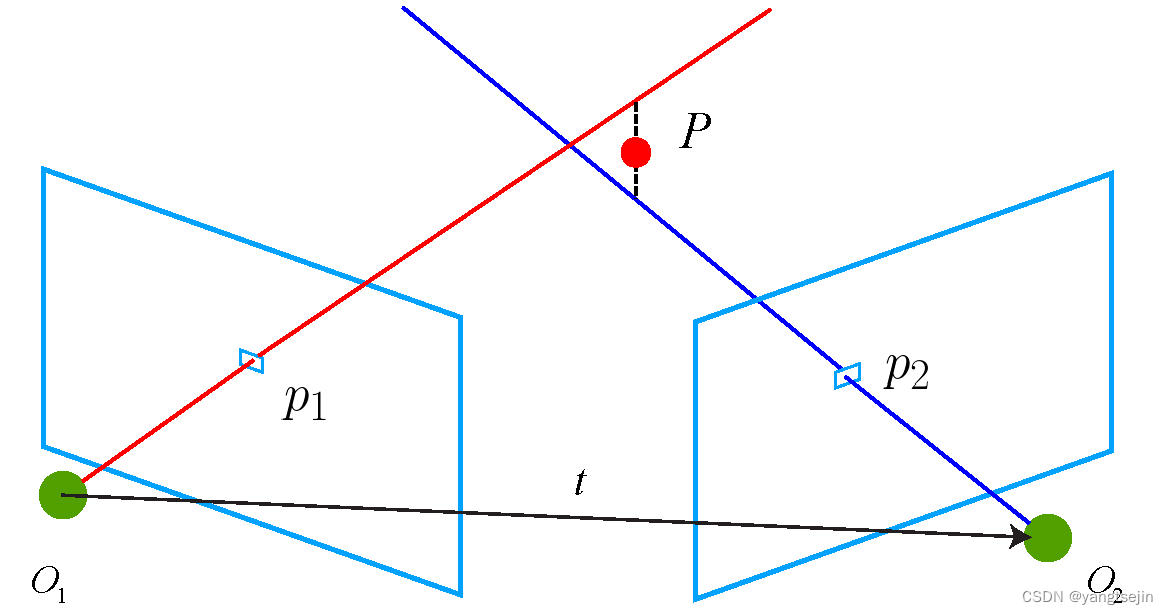
视觉SLAM理论到实践系列(六)——特征点法视觉里程计(4)
三角测量和PnP
视觉SLAM理论到实践系列:补充——泊松公式证明
泊松公式证明
Matlab带图形界面的深度学习目标检测程序
本程序实现了基于深度学习方法的目标检测,可以对图片和视频实现检测,并可视化检测到的结果。可以使用预训练的YOLOv4模型、AlexNet模型、基于AlexNet的迁移学习模型以及MaskRCNN模型。建议Matlab版本为2021及以上,否则可能部分功能无法使用,同时还需要确保已经安装Deep Learning Toolbox和Computer Vision Toolbox,否则无法使用程序。
SLAM算法与工程实践——相机篇:RealSense T265相机使用(2)
SLAM算法与工程实践——相机篇:RealSense T265相机使用(2)

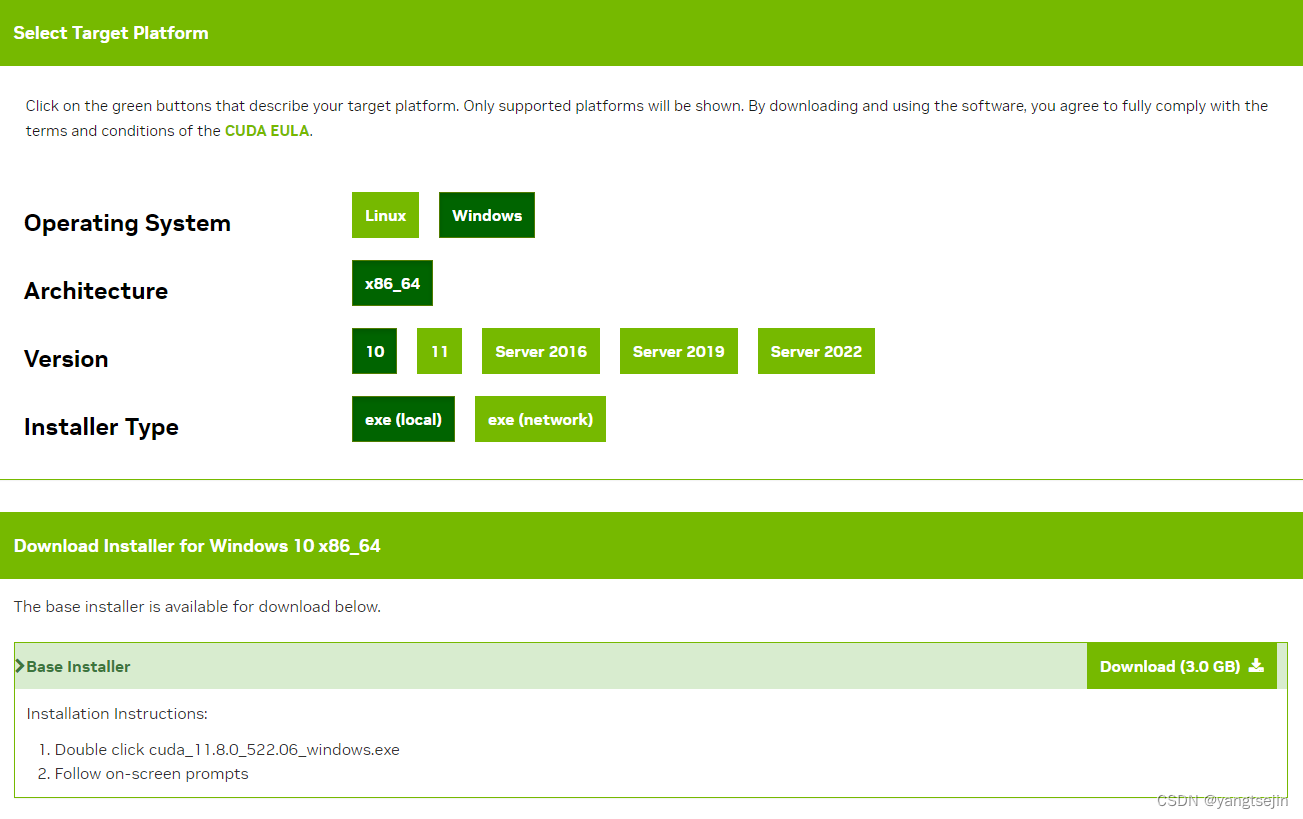
Windows深度学习环境配置
Windows深度学习环境配置
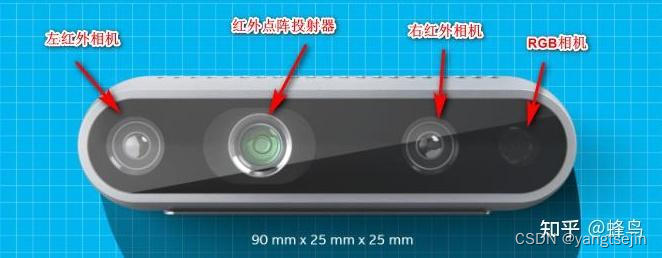
SLAM算法与工程实践——相机篇:RealSense D435使用(2)
SLAM算法与工程实践——相机篇:RealSense D435使用(2)
SLAM算法与工程实践——相机篇:RealSense D435使用(1)
SLAM算法与工程实践——相机篇:RealSense D435使用(1)