




- @qq_37469992
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
安装过程中显示:ERROR: Could not build wheels for roboticstoolbox-python, which is required to install pyproject.toml-based projects #496。只安装 MSBuild工具 是没用的, 我已经帮大家验证过了。你们有兴趣可以自己试试不勾选,然后看看报不报错。我没有测试需要哪一个,我使用的
2.2.3 在关键示教点间完成基于关节空间的轨迹规划,并基于Matlab Robotics Toolbox显示带有末端轨迹的动态运动结果。1.2 工作空间分析:根据正向运动学结果,运用 MATLAB进行工作空间分析,完成工作空间点云图和包络图;1.1 正向运动学:根据D-H法完成机器人的正向运动学(数学建模后基于Matlab计算公式);1.3 逆向运动学:根据正向运动学结果推导逆向运动学公式(封闭

要点总括(1)Strategy 类:定义所有支持的算法的公共接口,用纯虚函数定义抽象算法接口;(2)ConcreteStategy 类簇:封装了具体的算法或行为,继承自Strategy,各种策略的具体实现;(3)Context 类,持有一个策略类的引用,传入具体的ConcreteStategy来配置,最终给客户端调用。(4)工厂模式和策略模式的区别:https://blog.csdn.net/qq
脑图展开一般模型具体案例(Qt,C++)定义相关类,实现个人简历的初始化和拷贝工作,其中简历的数据成员包括:姓名、性别、年龄、任职时段、任职公司,以及用于观察浅拷贝的引用(指针)成员;class ICloneable{public:ICloneable();virtual ICloneable *Clone()=0;//抽象的Clone 方法ICloneable(QString id){this-
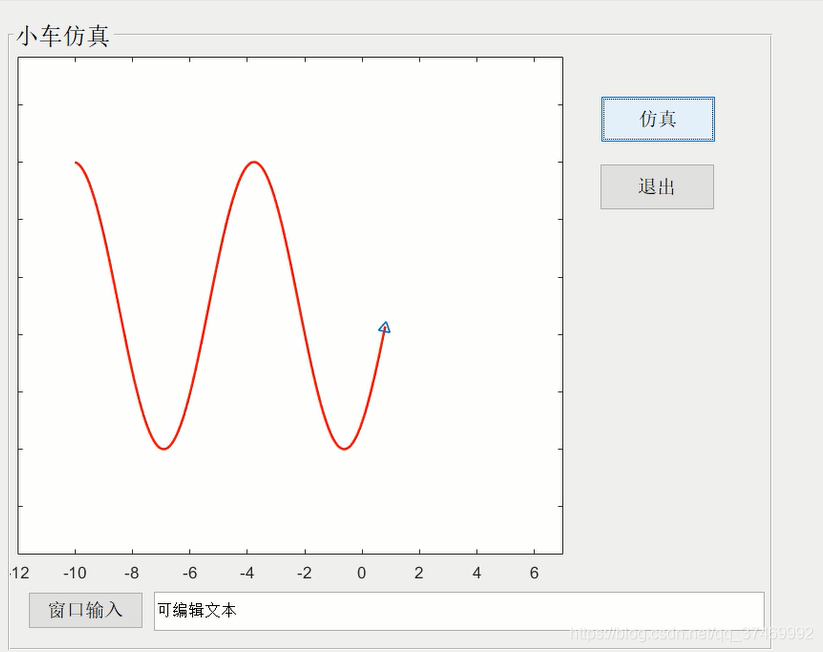
实现效果:(1)以等腰三角形表示一个小车,三角形顶点指向为小车的朝向,即前进方向。如下图所示,那么我们只要求用三角形表示,而不是图中的形状其运动学模型如下:(2)可以在窗口输入给定的线速度和角速度以驱动小车的运动,它们可以是时间序列数据,也可以是小车的位置(xc和yc)和方向(θ)的函数。(3)两个按钮,一个执行小车驱动任务并动态绘制小车的运动轨迹,一个退出仿真平台。(4)利用快捷菜单,对所得轨迹
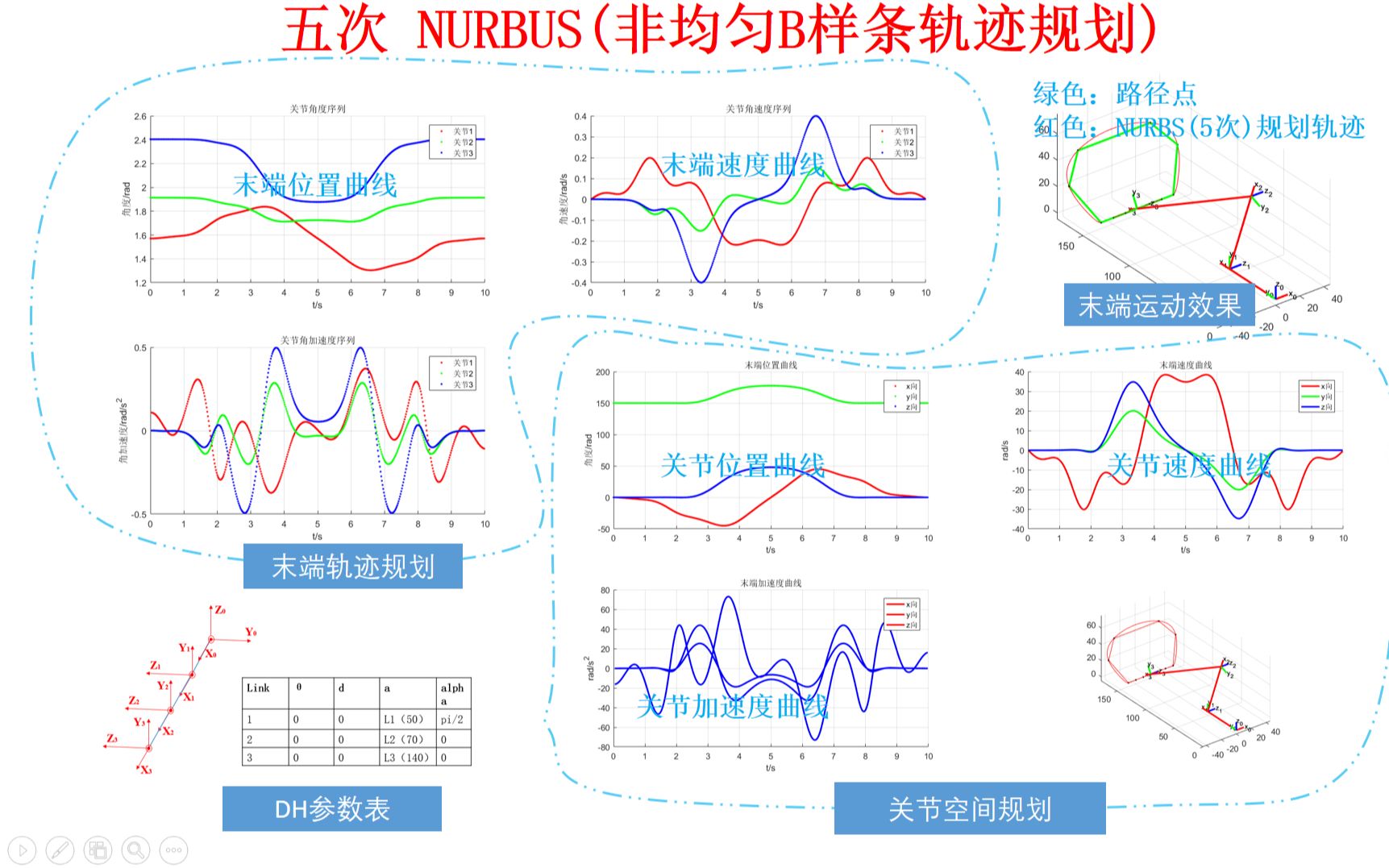
目录1.六自由度机械臂逆解仿真2. 小车(移动机器人)仿真平台3.轨迹规划4. 六自由度工业机器人DH建模与逆运动学仿真5. 机械臂轨迹规划matlab、Vrep联合仿真6. 粒子群轨迹规划7. 样条曲线轨迹规划8. 人形机器人控制仿真9. NUBUS五次非均匀B样条轨迹规划及机械臂仿真10.五次&三次多项式连续轨迹规划11. 主从机械臂||双机械臂跟随控制1.六自由度机械臂逆解仿真内容简
(5)仿真报告的主要内容包括: 封面(附件 2)、仿真题目、同组同学姓名、摘要、关键词、正文(仿真任务、仿真软件简介、仿真操作步骤及对应的内容、仿真的结果、仿真结果分析与讨论)、参考文献。大作业要求:构建工业机器人(各机器人结构与参数见附件 1)的仿真模型(1)机器人正运动学仿真。同组同学的参数不能相同。(3)任意设置两个点 A 和 B,给出机器人从 A 到 B 的关节空间轨迹规划的角位移、角速度
目录1.六自由度机械臂逆解仿真2. 小车(移动机器人)仿真平台3.轨迹规划4. 六自由度工业机器人DH建模与逆运动学仿真5. 机械臂轨迹规划matlab、Vrep联合仿真6. 粒子群轨迹规划7. 样条曲线轨迹规划8. 人形机器人控制仿真9. NUBUS五次非均匀B样条轨迹规划及机械臂仿真10.五次&三次多项式连续轨迹规划11. 主从机械臂||双机械臂跟随控制1.六自由度机械臂逆解仿真内容简
先放视频1. 基础知识(1)绕x轴旋转旋转矩阵Rot(φ,x)(2)绕y轴旋转旋转矩阵Rot(θ,y)(3)绕z轴旋转旋转矩阵Rot(φ,z)(4)坐标系间位置描述公式说明:0和1分别代表坐标系0和坐标系1,R01表示坐标系1相对于坐标系0的旋转矩阵,p1表示p点在坐标系1下的坐标,p0点表示p点在坐标系0下的坐标。(5)旋转矩阵求逆由正交性质,得到旋转矩阵的逆于...
