- @qq_35027690
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
随着第五代移动通信(5G)及未来物联网的快速发展,海量设备接入与多样化业务需求对无线频谱效率和资源管理能力提出了严峻挑战。非正交多址接入(Non-Orthogonal Multiple Access, NOMA)通过功率域复用允许多个用户在相同资源块上并发传输,显著提升了频谱利用率,但接收端需依赖串行干扰消除(Successive Interference Cancellation, SIC)实现
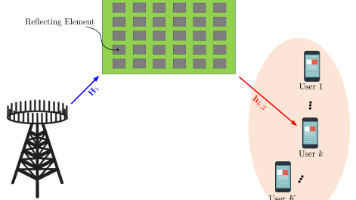
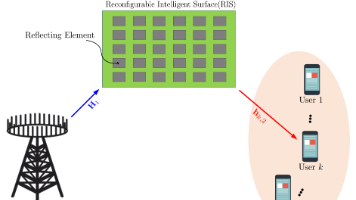
可重构智能表面(RIS)凭借其可编程调控无线信号传播的能力,被认为是第六代(6G)移动通信系统的关键技术之一。本文针对RIS辅助的多用户下行MISO系统,研究基站发射波束赋形矩阵与RIS相位偏移矩阵的联合设计问题,目标是在发射功率和单位模约束下最大化系统总速率。提出一种基于深度强化学习(DRL)的求解框架。将问题建模为马尔可夫决策过程(MDP),采用深度确定性策略梯度(DDPG)算法,通过试错交互
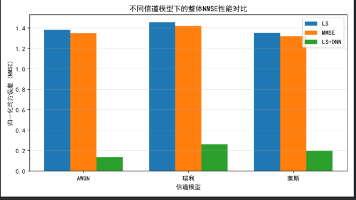
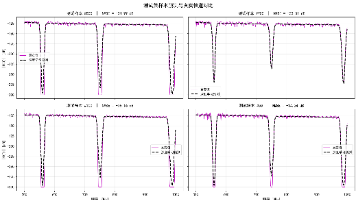
在 5G 新空口中,OFDM 是核心波形,而信道估计的质量直接影响系统吞吐量。传统的 LS 和 MMSE 估计器在低信噪比或复杂多径下性能受限。近年来,深度学习凭借其强大的特征提取能力,为信道估计提供了新的思路。本文从零搭建一个 OFDM 仿真平台,实现 LS、MMSE 以及基于 CNN 和 LSTM 的估计器,并对比它们在 Rayleigh 衰落信道下的 MSE 和 BER 性能。
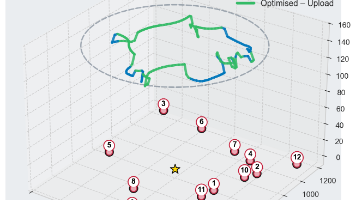
本文研究了一种基于无人机(UAV)的通信感知一体化(ISAC)系统,用于服务地面物联网(IoT)节点。系统通过优化UAV的三维轨迹、任务调度和功率分配,在满足运动学、覆盖和通信完整性约束的前提下,最大化所有节点的雷达感知估计速率总和。针对这一混合整数非凸优化问题,提出了基于块坐标下降(BCD)和连续凸近似(SCA)的多层迭代求解算法,将原问题分解为三个凸子问题交替优化。仿真结果表明,优化后的UAV
可重构智能表面(RIS)凭借其可编程调控无线信号传播的能力,被认为是第六代(6G)移动通信系统的关键技术之一。针对非理想信道状态信息(CSI)和硬件损伤带来的挑战,本文研究基站发射波束赋形矩阵与RIS相位偏移矩阵的联合设计问题,目标是在发射功率和单位模约束下最大化系统总速率。提出一种基于深度强化学习(DRL)的求解框架。将问题建模为马尔可夫决策过程(MDP),采用深度确定性策略梯度(DDPG)算法
在无线通信系统中,信道估计的准确性直接影响接收机的均衡、解调和译码性能。经典的最小二乘(LS)信道估计算法虽然实现简单,但在低信噪比环境下会受到严重的噪声放大影响,性能较差。最小均方误差(MMSE)估计器通过利用信道和噪声的二阶统计信息,可以获得比LS更优的性能,但其计算复杂度过高,且需要准确的统计先验,实际应用受限。本文提出了一种基于深度神经网络的信道估计增强方法,核心思想是学习并纠正LS估计的
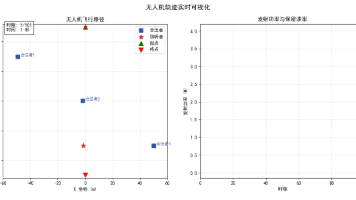
本文针对无人机安全通信场景中的轨迹与功率联合优化问题,提出了一种基于深度监督学习的求解框架。在该场景中,一架固定高度飞行的无人机需在给定起点和终点之间规划水平轨迹,并动态调整发射功率,以在满足最大速度约束的前提下最大化飞行全程的平均保密速率。由于该优化问题具有非凸、高维和约束耦合的特点,本文未直接求解,而是采用数据驱动的监督学习方法:通过利用贝塞尔曲线、正弦谐波扰动、窃听者避让、合法者吸引等规则生
随着 6G 无线通信向太赫兹(THz)频段拓展,信道估计成为制约系统性能的关键瓶颈。传统方法依赖 Kramers-Kronig关系对接收强度进行数值积分以恢复相位信息,计算复杂度高、延迟大,难以满足 6G 亚毫秒级实时性要求。本项目提出一种基于深度学习的端到端信道估计框架,直接从光电探测器输出的时域强度波形映射为完整的复频域信道传递函数 ,替代了传统的复杂计算。本项目为 THz 通信提供了一种高效
本项目针对5G超密集组网(UDN)场景下传统切换算法存在的乒乓效应、信令开销大、服务质量(QoS)保障不足等问题,提出了一种基于深度强化学习(DRL)的智能切换决策框架,将切换决策建模为马尔可夫决策过程,引导智能体学习长期最优策略,然后实现了基于深度Q网络(DQN)和近端策略优化(PPO)两种强化学习算法,并与传统的贪心SINR算法进行对比仿真。实验结果验证了DRL在抑制乒乓效应、保障紧急业务连续
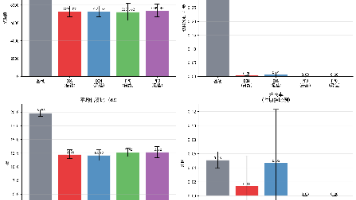
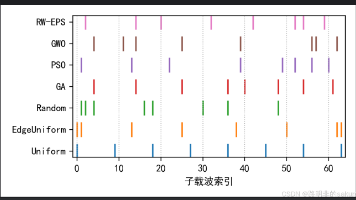
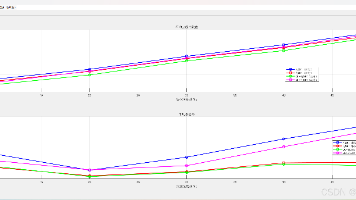
本文系统研究了在正交频分复用(OFDM)系统中,利用进化算法(遗传算法GA、粒子群优化PSO、灰狼优化GWO)优化导频位置以提升信道估计性能。通过构建完整的仿真框架,对比了均匀导频、边缘均匀导频、随机导频及多种进化算法导频的均方误差(MSE)与误比特率(BER)。在NNN个子载波中选择KKK个导频位置,本质是一个组合优化问题。