- @modest_laowang
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
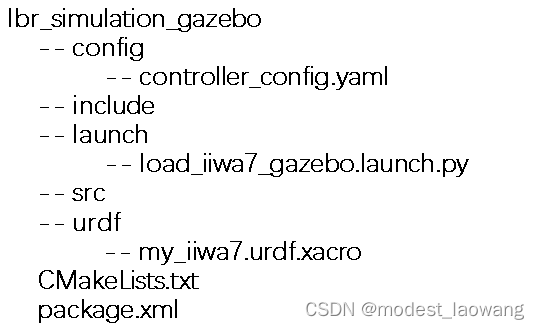
自由度机械臂+ros2 control+gazebo仿真
1. 最直接的诱因是,最近上网冲浪,看见一些网上有些同学(一些工科生)讨论一些数学问题,然后我感觉他们可能对一些问题的理解和认识尚且不足,比如对实数和极限的理解,原因可能是没有较为系统的学习数学,所以想写这篇博客,介绍一些课程和书籍帮助有需要的人或者有兴趣的朋友去自己找寻答案。《实变函数论与泛函分析》上册讲的是实变函数,讲述了实数的性质,测度论的建立(个人感觉讲的非常好,逻辑严谨丝滑),然后基于测

Ubuntu系统的python包管理——以Ubuntu 22.04为例Ubuntu系统的python包存储在哪里,apt和pip工具怎么管理python包,python包版本冲突为什么发生,如何解决,如何配置python包的路径等等问题,本博文详细讨论了这些问题。看完以后,可能对Ubuntu系统的python包管理有更加清晰和深刻的认识。
Ubuntu 22.04中安装cuda, cudnn, pytorch

最近,学习到了微分几何的“迷雾区”——推前映射(Push forward)和拉回映射推前映射比较容易理解,从一个切空间映射到另一个切空间。但是,余切空间(切空间的对偶空间)之间的拉回映射,开头给我整懵圈了(从数学层面,容易符号化推理出来,但是找不到对应的物理意义,就完全不知道为什么这样定义,感觉就像搞着玩一样)。结合机器人学,进行了进一步的思考(知道了为什么这么定义,不是瞎定义的),所以,记录如下
本文介绍了机器人控制中常用的阻抗控制和导纳控制。
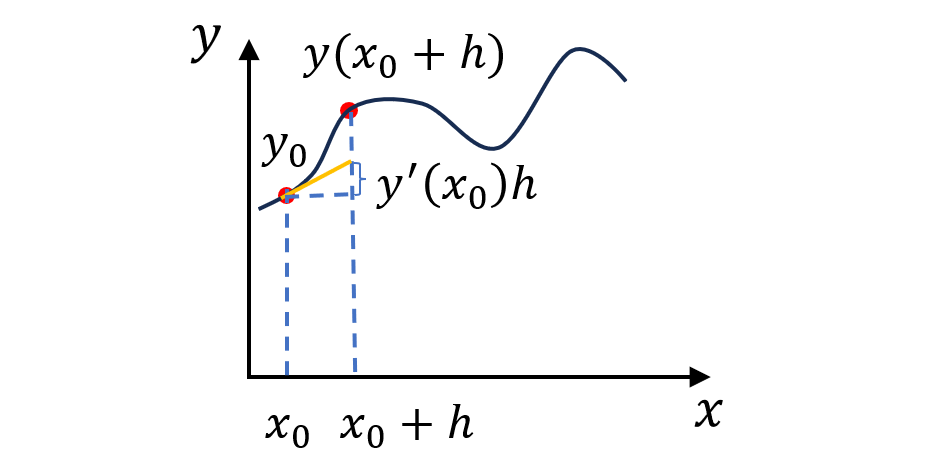
微分方程的解析解和数值解的关系,微分方程的解的存在性和唯一性