- @m0_74779543
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
✅ 硬件选择和配置知识✅ Python 和 Anaconda 安装✅ CUDA 和 cuDNN GPU 加速配置✅ PyTorch/TensorFlow 深度学习框架✅ 虚拟环境管理✅ 常用工具库安装✅ IDE 开发环境配置✅ 常见问题解决方法✅ 最佳实践规范

《机器学习零基础完全指南》是一份面向初学者的全面教程,采用通俗易懂的语言和丰富案例,帮助零基础学习者掌握机器学习核心概念与实践技能。文档首先通过"猫狗识别"的对比案例生动解释机器学习与传统编程的区别,阐明其"从数据中学习规律"的本质。内容涵盖机器学习基础概念(数据集、特征、标签等术语详解)、经典算法(线性回归、决策树、SVM等8大算法)、深度学习入门(神经网

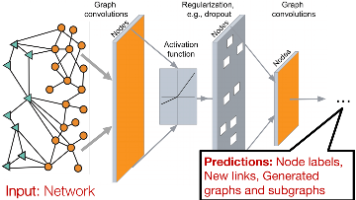
摘要 本文《图神经网络(GNN)完全指南》系统介绍了图神经网络的基础知识与应用。首先解释了图数据结构的基本概念,包括节点、边的定义,以及社交网络、分子结构等现实中的图示例。文章对比了传统神经网络(CNN、RNN)处理图数据的局限性,指出图神经网络在处理不规则结构、可变邻居数量等图数据特性上的优势。通过邻接矩阵、邻接表等可视化示例,展示了不同的图表示方法。全文采用模块化结构,涵盖从图基础理论到GNN
✅ 硬件选择和配置知识✅ Python 和 Anaconda 安装✅ CUDA 和 cuDNN GPU 加速配置✅ PyTorch/TensorFlow 深度学习框架✅ 虚拟环境管理✅ 常用工具库安装✅ IDE 开发环境配置✅ 常见问题解决方法✅ 最佳实践规范
摘要 本文《图神经网络(GNN)完全指南》系统介绍了图神经网络的基础知识与应用。首先解释了图数据结构的基本概念,包括节点、边的定义,以及社交网络、分子结构等现实中的图示例。文章对比了传统神经网络(CNN、RNN)处理图数据的局限性,指出图神经网络在处理不规则结构、可变邻居数量等图数据特性上的优势。通过邻接矩阵、邻接表等可视化示例,展示了不同的图表示方法。全文采用模块化结构,涵盖从图基础理论到GNN
✅ 硬件选择和配置知识✅ Python 和 Anaconda 安装✅ CUDA 和 cuDNN GPU 加速配置✅ PyTorch/TensorFlow 深度学习框架✅ 虚拟环境管理✅ 常用工具库安装✅ IDE 开发环境配置✅ 常见问题解决方法✅ 最佳实践规范
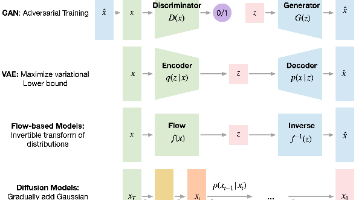
扩散模型完全指南:从零理解生成式AI新范式 本文系统讲解当前最先进的图像生成技术——扩散模型。从基础概念到数学原理,再到代码实现,帮助读者全面掌握这一AI生成领域的关键技术。 核心要点: 扩散模型通过"加噪-去噪"的渐进过程生成高质量图像,相比GAN更稳定且效果更好 前向扩散过程逐步添加噪声,反向过程则学习去噪以重建图像 数学上基于马尔可夫链和变分推断,通过噪声调度控制扩散节奏
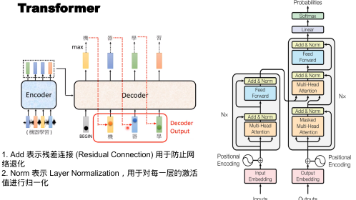
Google于2017年提出的Transformer架构,通过完全基于自注意力机制的模型设计,彻底摒弃了传统的循环与卷积结构,实现了前所未有的并行训练能力与强大的长距离依赖建模。该模型不仅在机器翻译任务上以显著优势刷新了纪录,其“注意力即所有”的核心思想更奠定了此后大模型时代的基石,直接启发了如GPT、BERT等系列模型的诞生,成为人工智能发展史上的一座里程碑。
本文是AirSim无人机控制API的全面指南,适合零基础学习者。文章系统介绍了四大类控制方式:动作控制(Movement API)、速度控制(Velocity API)、位姿控制(Pose API)和路径规划控制(Path API),详细讲解了各类API的特点、适用场景及具体使用方法。内容包含Python代码示例、坐标系说明和常见错误解决方法,并提供了一个"画正方形"的完整飞行
本文介绍了微软开源的AirSim机器人仿真平台,重点讲解了其核心功能、安装步骤和基础使用方法。AirSim通过Unreal Engine提供高逼真度的无人机/无人车仿真环境,支持传感器模拟和API控制,能有效降低开发成本和风险。文章详细说明了Windows系统下的安装流程,并提供了一个简单的Python控制脚本示例,演示无人机起飞、飞行和降落的基本操作。最后还介绍了常用的调试工具和方法,包括视角切