




- @m0_61595251
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
MLP Head 是指位于模型顶部的全连接前馈神经网络模块,用于将提取的图像特征表示转换为最终的分类结果或其他预测任务输出。MLP Head 通常跟在 Transformer Encoder 的输出之后,作为整个模型的最后一层。可以简单理解为一个全连接层,若需要类别概率需要再接上一个softmax激活函数。

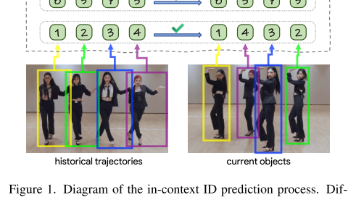
时间:2025会议:CVPR作者:Ruopeng Gao,Ji Qi,Limin Wang传统多目标跟踪方法在目标关联阶段严重依赖人工设计的启发式规则,难以适应复杂场景将MOT重新表述为一种 in-context 的 ID 预测问题,并构建一个端到端可训练的框架 MOTIP不依赖复杂的匹配策略,仅使用目标级特征即可在多个数据集上达到很好的效果。
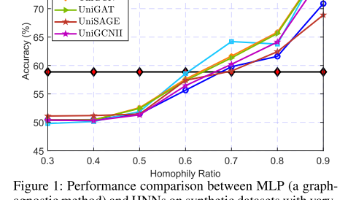
时间:2025会议:AAAI作者:Ming Li, Yongchun Gu, Yi Wang*, Yujie Fang, Lu Bai*, Xiaosheng Zhuang, Pietro Lio提出面向超图的双重同配比度量,实现结构-标签偏置的数值化评估;构建面向异配场景的大规模、多领域基准数据集;设计基于framelet变换的低通-高通双通道模型 HyperUFG,作为异配超图学习的强基线①当
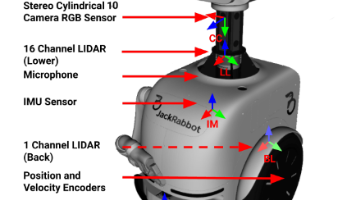
JRDB 是一个面向真实机器人应用、强调第一视角、遮挡严重、尺度变化极端的2D 标注规模极大的数据集。特别适合用于多目标跟踪(MOT)、遮挡建模、群体行为建模以及Egocentric MOT 方法研究。
【科研绘图小白如何快速入门3dmax,一份基础且不细致的讲解】 https://www.bilibili.com/video/BV1DT4y117rZ/?
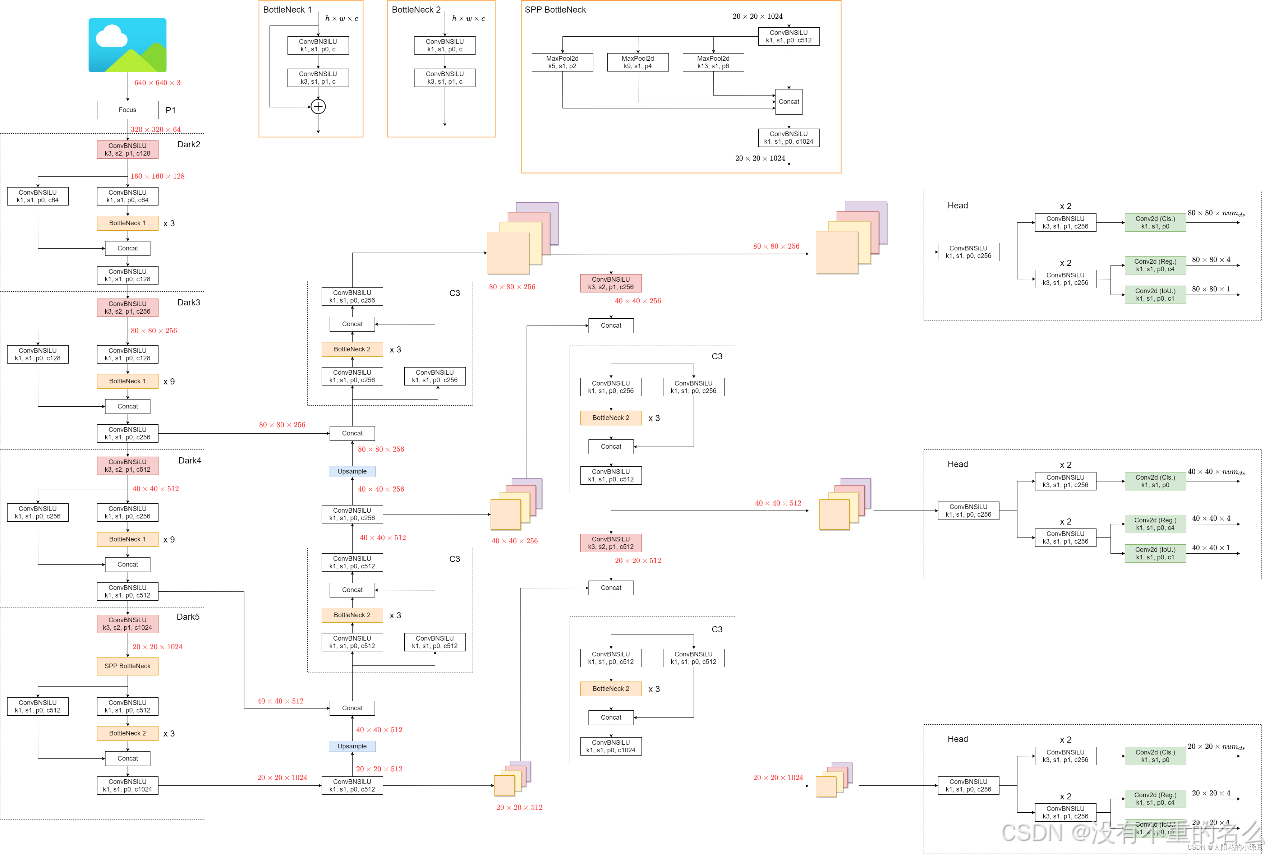
对于网络在每一个grid cell处都会预测4个参数(tx、ty、tw、th),tx与ty预测的是目标中心点相对于当前grid cell相对于当前grid cell左上角点的偏移量,预测边界框的高度和宽度用e的指数计算,计算得出的Xcenter、Ycenter、w、h都是在特征图尺度上的,需要*stride得到在原图的尺度。构建Anchor Point与每个GT之间的IoU矩阵,IoU矩阵并不需要
基于点的跟踪思想,通过预测目标的中心点来进行跟踪,同时实现检测与跟踪的同步,结合目标检测和运动估计,使得在处理动态场景时更高效、更准确。通过同时处理目标的位置信息和运动轨迹,CenterTrack 能够实时跟踪多个物体。

RNN中存在梯度爆炸和梯度消失问题,梯度消失问题严重RNN希望将所有的信息记住,不论是有效信息还是无效信息LSTM设计一个记忆细胞,具备选择性记忆的功能,可以选择记忆重要信息,过滤掉噪声信息,减轻记忆负担与RNN对比:RNN串联的通过一个箭头串联LSTM通过两个箭头将每个时间步相连接,称为记忆细胞:代表门控单元,输出在[0,1]之间遗忘门:将值向0减少;尽可能将无关记忆遗忘,通过对应元素相乘将中对


