




- @m0_55202222
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
以上就是笔记的内容,本文简单介绍了NumPy的基础使用,而NumPy提供了大量能使我们快速便捷地处理数据的函数和方法,继续学习一下Numpy进阶
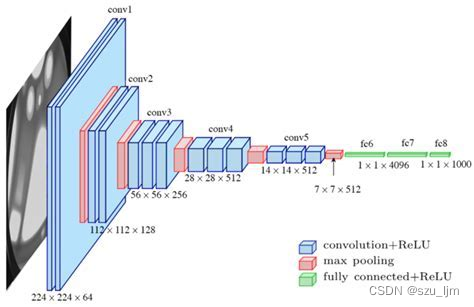
卷积神经网络(Convolutional Neural Network,CNN)在设计上受到了人脑视觉系统的启发,并具有一些与类人脑属性相关的特点。
上次笔记阐述了一般的线性回归模型实现的数学原理和整体思路,但不是每个样本数据集都适合用线性回归,比如说样本数据的分布呈振荡的曲线,我们就可以尝试更高次的曲线来拟合样本数据,这时候就要用多项式回归模型,但是阶数过多也会带来过拟合的风险,导致模型在其他数据集的表现比较差。
以上就是今天matplotlib库学习笔记的内容,本文简单介绍了matplotlib工具的使用,而matplotlib提供了大量能使我们快速便捷地绘制图像的函数和方法,值得更多深入的应用。
Darknet_ros将YOLO算法集成到ROS中,使得机器人可以实时地检测和识别周围环境中的物体。它提供了一些ROS节点和服务,可以在ROS系统中轻松使用YOLO算法进行目标检测和识别。同时,它还提供了一些示例程序,帮助用户快速了解如何在ROS中使用深度学习算法进行机器人视觉任务。

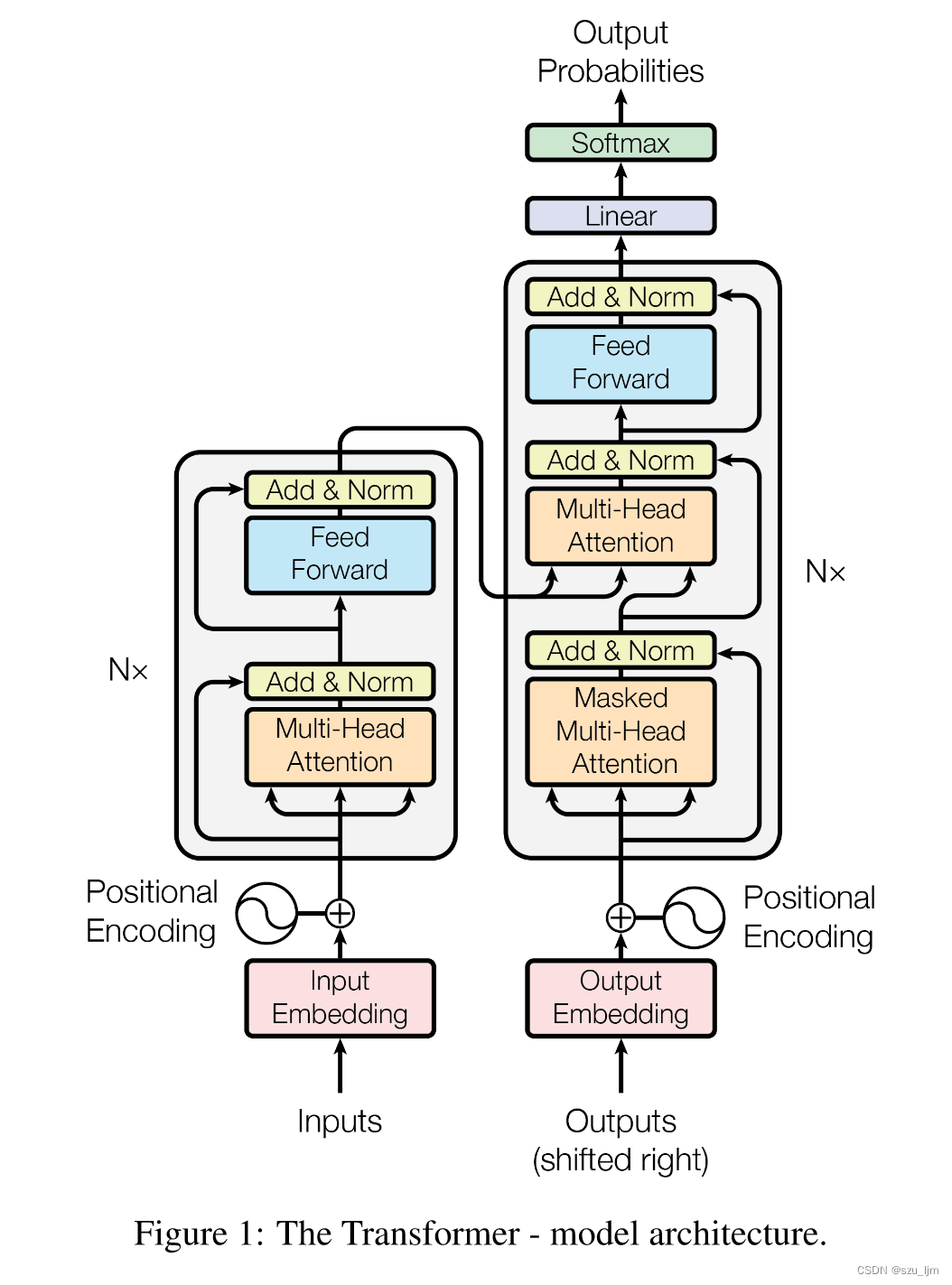
Transformers 模型在自然语言处理(NLP)领域取得了巨大的成功,并在许多任务中取得了 state-of-the-art 的结果。后面研究人员也开始将其应用于计算机视觉(Computer Vision)领域,并取得了一些令人印象深刻的结果,像ViT(Vision Transformers)这种SOTA模型。
以上就是今天笔记的内容,本文简单介绍了线性规划和非线性规划的总体实现思路和求解方法,线性规划和非线性规划在数学建模和机器学习中被广泛地应用,特别适合一些最优化方案的求解,线性规划和非线性规划的模型也有自身的局限性,总之善于利用不同模型的优势才能更加彻底的剖析事物背后的数学逻辑。
以上就是今天笔记的内容,本文简单介绍了线性规划和非线性规划的总体实现思路和求解方法,线性规划和非线性规划在数学建模和机器学习中被广泛地应用,特别适合一些最优化方案的求解,线性规划和非线性规划的模型也有自身的局限性,总之善于利用不同模型的优势才能更加彻底的剖析事物背后的数学逻辑。
以上就是今天matplotlib库学习笔记的内容,本文简单介绍了matplotlib工具的使用,而matplotlib提供了大量能使我们快速便捷地绘制图像的函数和方法,值得更多深入的应用。
以上就是今天笔记的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法,继续学习pandas进阶