




- @lx_ros
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
NanoDet是上海人工智能实验室的RangiLyu于2020年10月份开源的轻量级检测项目,取得了很好的效果,广受关注。2021年12月份,作者又更新发布了NanoDetPlus,在coco val上的map提升了7个百分点。虽然作者将模型最终的输出concat为了一个输出,从下图可以看到有四个输出头,对应的stride分别为。
【机器人领域几大国际会议】(1)ICRA:IEEE International Conference on Robotics and Automation,即IEEE机器人和自动化国际会议,由IEEE Robotics and Automation Society (RAS,机器人和自动化学会)主办,该领域规模(千人以上)和影响力最大的顶级国际会议。至今(2012年)已经成功举办了29届,只在中国
孪生神经网路SiameseNetwork介绍及基于Pytorch的实现
计算过程如上图所示,值的注意的是空间注意力机制的使用,先是对每个通道取均值得到特征图每个像素位置上的重要性,再将其加到原输入特征图上,增强每个位置的特征值,再通过卷积输出通道为N个的注意力权重,使得输出的权重能衡量每个尺度特征图的重要性。中的主要创新是自适应多尺度特征融合(Adapptive Scale Fusion,ASF)模块的提出。来实现,这样做并没有考虑不同尺度特征图的重要性是不一样的。图
文章目录1 针孔相机模型2.双目相机模型3.立体校正(共面行对准、极线校正)3.1极线约束3.2Bouguet算法3.3OpenCV API 介绍4. 立体匹配与视差图5.深度图5.1 基础介绍5.2OpenCV API6.双目测距精度分析7.总结1 针孔相机模型如基本相机模型及参数中介绍的,首先回忆一下针孔相机模型,如上图,空间中的一点到图像平面的变换为:ZM[xmym1]=[f000f0001
一、安裝google輸入法sudo apt-get install fcitx fcitx-googlepinyin fcitx-table-wbpy fcitx-pinyin fcitx-sunpinyin安裝完成后在System Setting中找到Language Support 选项,选择使用fcitx重启电脑,在System Setting 中找到 Text Entry选项,点击进入,之
元学习算法MAML简介1.元学习(meta learning)2.模型无关元学习2.1 元学习问题建模2.2 MAML算法3.将MAML应用到回归分类任务上的算法流程参考资料论文: Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks Chelsea代码: https://github.com/cbfinn/mamlIC
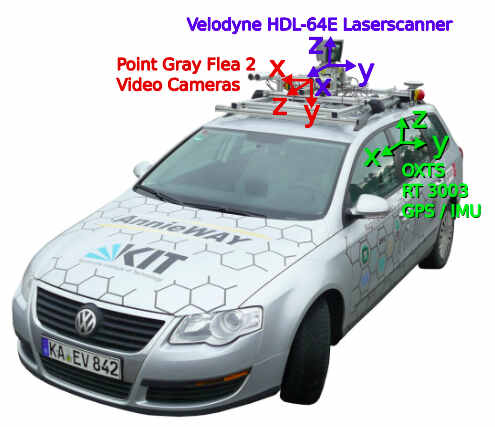
KITTI是德国卡尔斯鲁厄科技学院和丰田芝加哥研究院开源的数据集,最早发布于2012年03月20号。对应的论文发表在CVPR2012上。KITTI数据集搜集自德国卡尔斯鲁厄市,包括市区/郊区/高速公路等交通场景。采集于2011年09月号及10月03号的白天。KITTI数据采集使用的平台如下图,上面平台中包括从上图中可以看到IMU/GPS总结,KITTI数据集是由4个相机,1个激光雷达,1个IMU/
是澳洲阿德莱德大学的Zhi Tian等最早于2019年04月提交的工作成果,发表在ICCV上。FCOS是全卷积实现的的一阶目标检测器,避免了训练过程中Anchor相关的计算,减少的训练时的计算量和内存占用,移除了anchor相关的一系列超参数。检测性能对anchor的size//数量比较敏感。实际对象的检测框大小分布较广泛,anchor不一定能覆盖为了得到高召回率,的方法返回了非常多的anchor
四)旋转物体检测数据roLabelImg转DOTA格式。