




- @jz_ddk
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
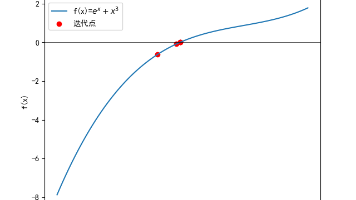
牛顿迭代法是一种高效求解非线性方程根的数值方法,通过函数在初始点的切线(一阶泰勒展开)逼近零点,具有二阶收敛速度。其应用场景包括工程优化(如机器人运动学逆解)、机器学习参数优化(逻辑回归)及科学计算(微分方程求解)。优点是收敛速度快,但依赖初始值且需显式导数;改进方法包括割线法和阻尼牛顿法。示例通过Python代码演示了求解方程 e^x + x^3 = 0,展示迭代过程及可视化结果。
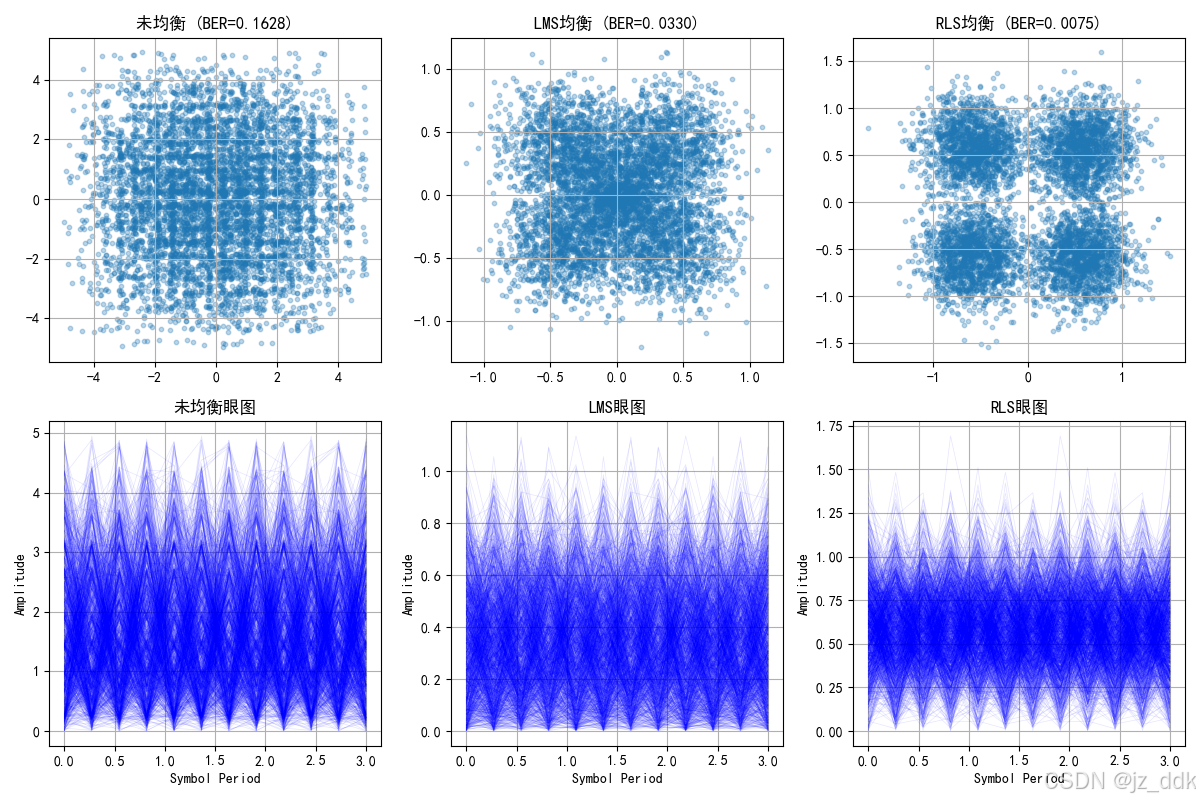
自适应均衡技术是补偿通信信道失真的关键手段。本文从理论、算法到实践全面解析其设计流程:首先建立多径信道模型,推导LMS与RLS算法的数学原理;其次讨论均衡器参数设计、硬件实现优化及抗噪策略;最后通过Python仿真对比不同算法性能,并给出Wi-Fi 6E应用案例。仿真结果表明,RLS收敛速度优于LMS,但计算复杂度更高。未来,结合深度学习的智能均衡技术有望进一步突破性能瓶颈。
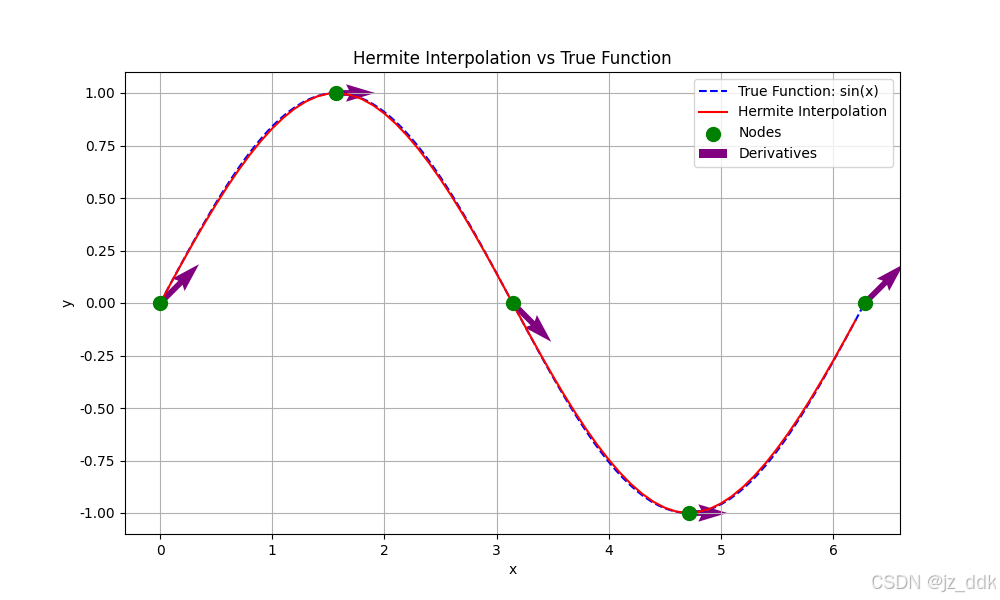
**摘要**:本文系统解析埃尔米特插值方法,从基础原理出发,阐述其通过匹配节点处函数值与导数实现高阶光滑性的核心优势,推导分段三次埃尔米特插值的数学公式,并提供完整的C语言实现代码。通过以\( \sin(x) \)为目标的插值案例,结合Python可视化对比插值结果与真实函数,直观展示方法效果。同时,深入分析其依赖导数信息、高次多项式震荡等局限性,并给出适用场景判断指南(如物理轨迹模拟、平滑动画设
本文系统阐述了卫星导航系统中码相位与载波相位的计算模型。主要内容包括:1)基于传播延迟和卫星发射时间的码相位计算方法;2)考虑整周模糊度的载波相位计算公式;3)引入卫星钟差和相对论效应的修正模型;4)接收机数字实现中的NCO控制字计算。文章推导了多普勒频移与相位变化的关系,总结了码相位和载波相位的数学关系,为导航接收机中的码环和载波环跟踪提供了理论基础。这些公式构成了卫星信号处理的核心数学模型,实

LVGL是一个开源的嵌入式图形库,专为资源受限设备设计,能在低内存和低速CPU下提供流畅的UI体验。它具有40+控件、类似CSS的样式系统、高级图形功能和高度可移植性,最低仅需64kB Flash和16kB RAM。LVGL采用事件驱动架构,通过周期性中断和主循环处理动画、输入和重绘。本文通过VS Code+PlatformIO环境,演示了如何在PC模拟器上创建LVGL的"Hello W

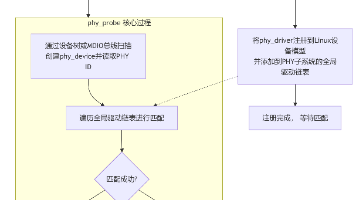
本文详细解析了Linux内核中PHY驱动的注册与调用流程,分为两个主要阶段: 驱动注册阶段:通过module_phy_driver宏展开为模块初始化函数,调用phy_driver_register将驱动注册到全局链表中。 驱动调用阶段:当MAC驱动触发PHY查找时,通过phy_probe函数完成关键操作: 创建phy_device(通过设备树或MDIO扫描) 进行驱动匹配(优先OF匹配表,其次PH
本文以Motorcomm YT8531SH PHY芯片为例,深入解析Linux网络PHY驱动的架构与实现。Linux网络采用分层设计,包含MAC驱动、PHY驱动和MDIO总线。PHY驱动通过phy_driver结构体实现,包含设备探测、初始化配置、电源管理等关键回调函数。驱动加载流程包括MDIO总线初始化、PHY驱动注册、硬件探测匹配等阶段。设备树配置涵盖时钟输出、RGMII时序调整、驱动强度等关

本文系统探讨了太空高能粒子辐射对电子系统的威胁及防护策略。太空辐射会引发单粒子翻转、闩锁、功能中断和栅击穿等效应,严重影响计算系统可靠性。针对不同存储器类型(SRAM/DRAM需ECC纠错和定期擦洗,Flash需硬件写保护和多副本存储)和操作系统(裸机系统最可靠,RTOS平衡实用,通用OS风险高)提出了差异化加固方案。CPU防护包括芯片级工艺加固和系统级三模冗余等策略。

Linux杂项设备驱动(MISC Device)是一种轻量级的字符设备驱动框架,通过统一主设备号(10)和动态分配次设备号简化设备注册流程。该驱动核心数据结构包括miscdevice(定义设备参数)和file_operations(实现设备操作接口)。注册时只需调用misc_register()即可自动完成设备节点创建。适用于传感器、调试接口等简单硬件设备,具有开发便捷、资源占用少等优点,但功能扩

本文详细介绍了Linux系统的中断机制及用户空间使用中断的5种方法。首先概述了Linux中断类型(硬中断、软中断、异常)和处理流程,包括内核的分层处理机制。然后重点讲解了5种用户空间中断使用方法:系统调用、信号处理、UIO(用户空间I/O)、eventfd+epoll和VFIO,提供了每种方法的代码示例和适用场景。文章还对比了各方法的性能特点,并给出中断调试工具和最佳实践建议,如优先选用event
