




- @jinshushijie
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
需要对转换的onnx模型进行验证,这个是yolov8官方的转换工具,相信官方无需onnx模型的推理验证。这部分可以基于yolov5的模型转转换进行修改,本人的测试就是将yolov5的复制出来一份进行的修改。当前的测试也是基于Python的yolov5版本修改的,模型和测试路径如下。当前的测试也是基于C++的yolov5版本修改的,模型和测试路径如下。使用的转换脚本是yolov8官方的转换脚本。

1、需要先标定相机的内参和外参。当前测试使用的主要是虚拟的测试视频,所一相机的内参都是相同,相机内参为根据上述的参数就可以自己算图像的坐标点和相机坐标点的对应坐标,计算公式如下所示:真实图像上的坐标点(个人理解就是校正后的图像坐标点)系数相机的内参(参见上述的数据a0=160、a2=-0.002、a3=0、a4=0)半径根据相机的内参数据就可以计算语言图像的矫正图像,一下是相机的矫正图像效果图像。
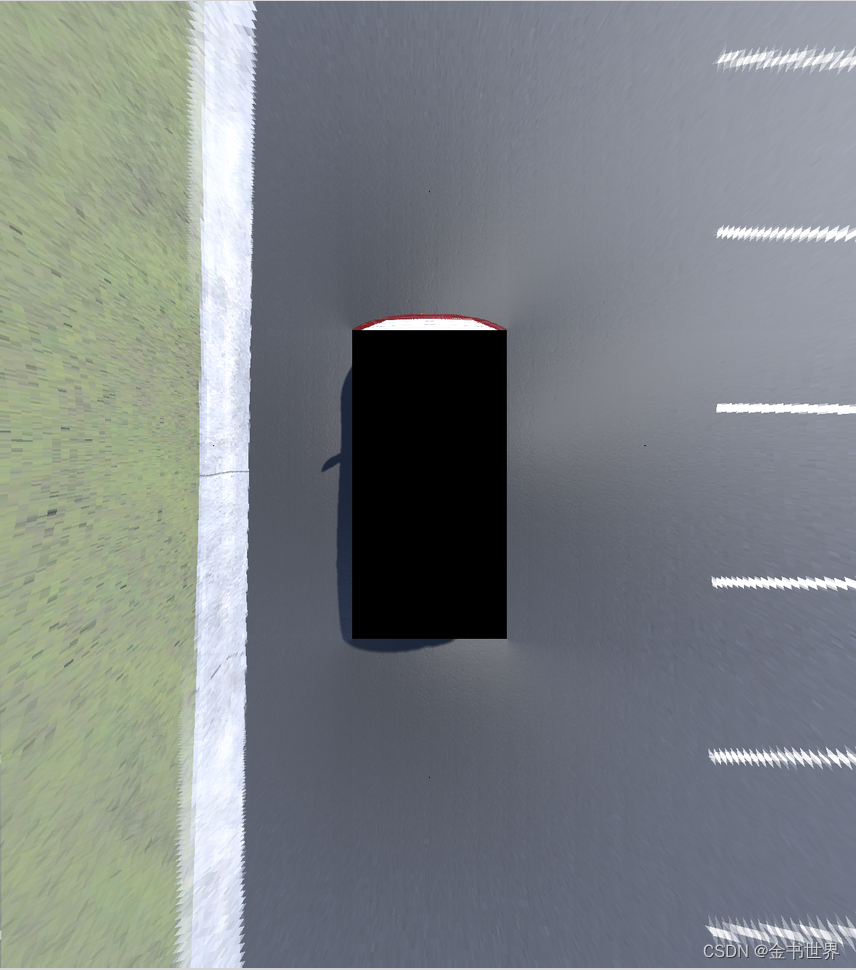
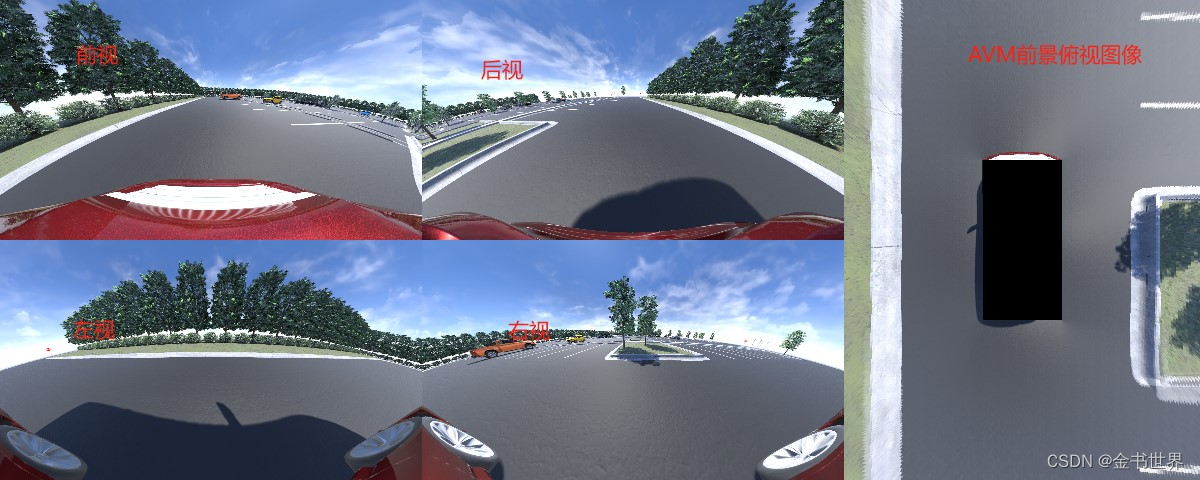
540度全景影像是什么540度全景影像是在360度全景影像基础上的升级功能,它增加了更多的摄像头来收集周围的图像数据。通常,这些摄像头分布在车辆的更多位置,例如车顶、车底等,以便更全面地捕捉车辆周围的情况。在开启全景影像功能时,这些摄像头收集的图像数据会被系统处理并拼接在一起,形成一个从车顶鸟瞰的全景俯视图。这种视图可以提供更全面的视野,帮助驾驶员更好地了解车辆周围的环境,从而提高驾驶安全性和便利

链接:https://pan.baidu.com/s/1kVUA2YgRAxk7m1TYi-wsnQ?算法的实现主要是根据四个摄像头的安装位置、相机的的内外参数实现对图像的畸变矫正、视图的变换和全景的图像拼接、图像拼接的位置的平滑过度;需要根据标定相机的内参参数初始化相机畸变矫正参数(当前测试的相机内参是相同的,所以使用相同的参数进行初始化)获取四个摄像头的图像数据(本测试使用的是opencv读取
( 内部包含修改后的工程和训练用的数据集:训练9170样本测试1097样本,训练好的模型可以直接使用哦,当前训练时间较短部分检测效果不是很好可以在当前模型上继续训练 )准备好数据后配置文件yolov5s_self.yaml。准备好数据后配置文件coco.yaml。
超广角模式/转向模式/3D碗型投影模式/窄边模式/车轮模式等的实现
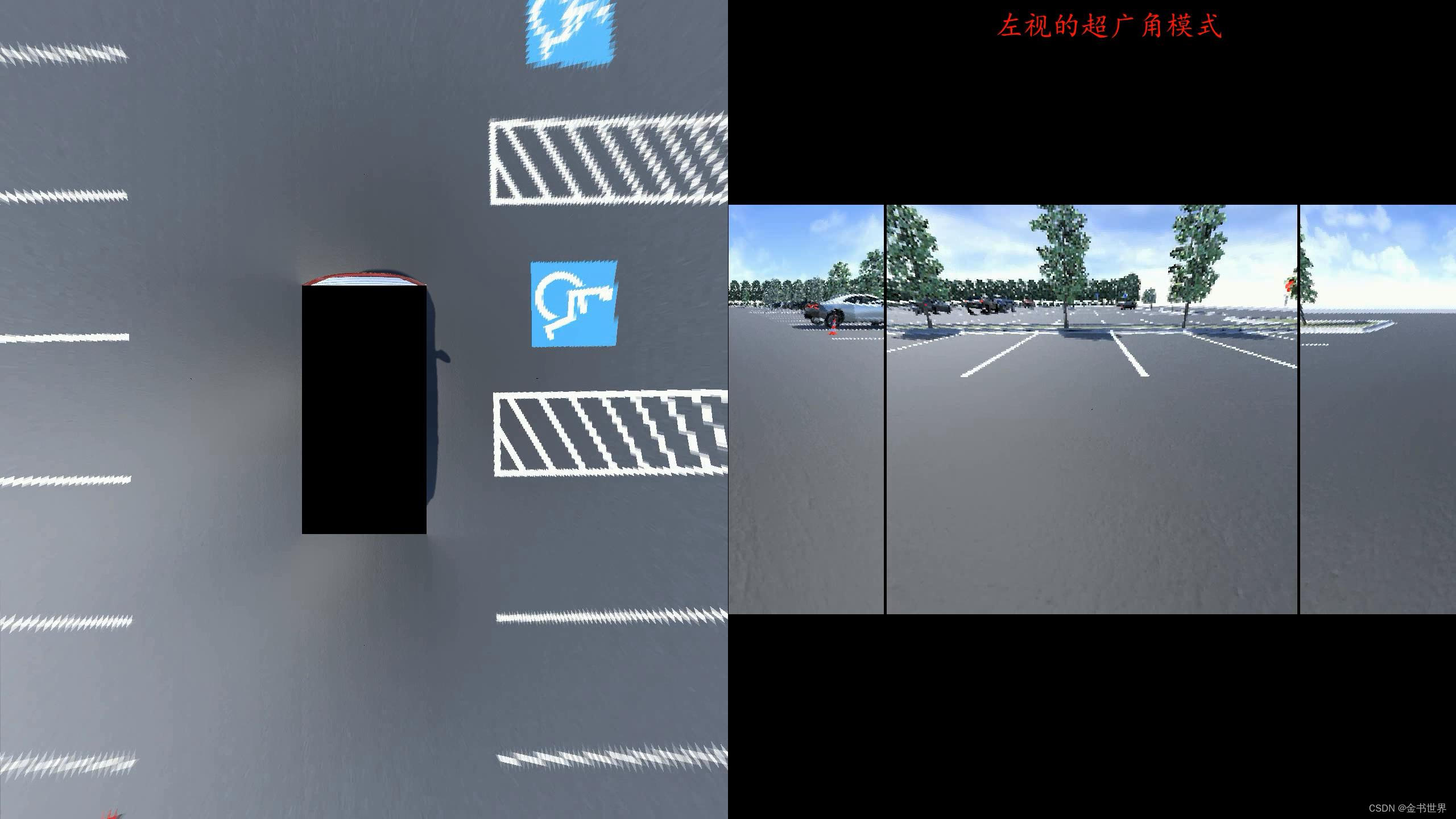
c语言版本和算法原理的可以查看本人的其他文档。《自动驾驶AVM环视算法--540度全景的算法实现和exe测试demo》本文档进用于展示部分代码的视线,获取方式网盘自行获取(非免费介意勿下载):链接: https://pan.baidu.com/s/19fxwrZ3BbsAW04VpXC7XRw 提取码: 7uxm。注:当前python的版本效率比较低,需要加速的可以自行优化加速代码,实现的过程是从
可以直接获取yolov3和yolox的模型转成caffe模型的虚拟机,无需将时间用在搭建开发环境上,让更多的精力实现更有价值的学习。模型转换的虚拟机:链接:https://pan.baidu.com/s/1xiB3n7WxYIz8BqzojfsXyw提取码:42lq包括:YOLOv3、YOLOv3-spp、YOLOv3-tiny的模型输入模型输出模型模型转换caffe模型

需要对转换的onnx模型进行验证,这个是yolov8官方的转换工具,相信官方无需onnx模型的推理验证。这部分可以基于yolov5的模型转转换进行修改,本人的测试就是将yolov5的复制出来一份进行的修改。当前的测试也是基于Python的yolov5版本修改的,模型和测试路径如下。当前的测试也是基于C++的yolov5版本修改的,模型和测试路径如下。使用的转换脚本是yolov8官方的转换脚本。