- @jianmo1993
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本教程详细介绍了如何使用SDF(Simulation Description Format)创建Gazebo自定义仿真世界。主要内容包括:1) SDF文件基本结构,以XML格式定义世界名称和版本;2) 物理引擎配置,设置步长和实时因子;3) 常用插件功能,包括物理模拟、用户命令和场景广播;4) GUI界面配置,涵盖3D场景显示、世界控制和统计面板。通过合理配置这些元素,可以构建包含物理特性、交互功
本教程介绍了在Gazebo中使用SDF格式创建四轮小车仿真模型的方法。模型包含956kg的长方体底盘(4.5×1.8×1.5m)、前轮转向系统(最大转向角±34.4度)和后轮驱动系统(最大扭矩100000N·m)。详细解析了底盘惯性参数、碰撞属性设置,以及转向和驱动系统的关节配置,包括转向限制、阻尼系数和摩擦参数等关键动力学特性。通过XML代码示例展示了各部件链接与关节的具体实现方式,为构建逼真的

本文介绍了在Gazebo仿真环境中添加和使用三种传感器的方法:IMU传感器、接触传感器和激光雷达传感器。首先通过添加插件和配置参数实现IMU传感器的姿态数据输出,并演示了数据监听方法。其次创建障碍物模型并配置接触传感器,实现碰撞检测和机器人停止功能。最后简要提及了激光雷达传感器的框架搭建。教程提供了详细的XML代码示例和参数说明,帮助用户在机器人仿真中实现环境感知功能。
回转数是指从点P出发,沿着多边形的边界走一圈,回到起点时,点P绕了多少圈。如果回转数为0,则点P在多边形外部;如果回转数不为0,则点P在多边形内部。射线法的基本思想是从待判断的点出发,向任意方向发射一条射线,然后计算这条射线与多边形边界的交点数目。:通过叉乘的符号,我们可以计算出每条边对点P的回转贡献。:遍历多边形的所有边,累加每条边的回转贡献。如果点P在多边形外部,累加的结果将为0。在计算机图形
在计算机图形学、几何计算和工程领域中,经常需要计算两条线段的交点。本文将详细介绍线段交点计算的原理、公式推导过程以及代码实现。要计算两条线段的交点,我们首先需要确定这两条线段是否相交。线段可以由两个端点定义,设线段。:如果线段相交,那么存在。区间内,那么线段相交。
车辆运动学模型的线性化和离散化及代码实现
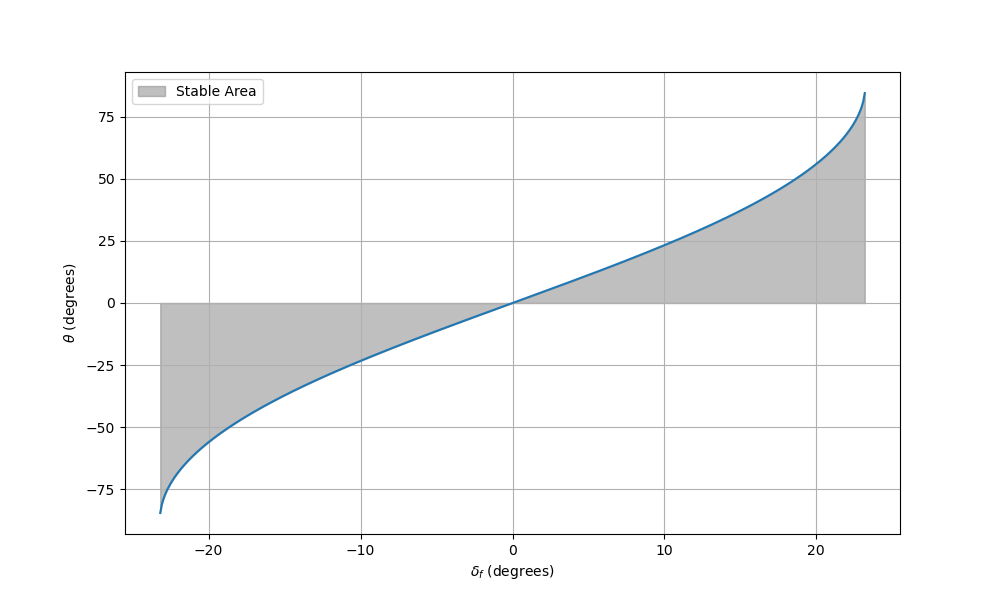
铰接角是在对铰接式车辆进行运动分析时,关乎车辆稳定性的重要参数,当车辆前进时,铰接角过大会使车辆陷入原地转向的状态,倒车的时候,铰接角过大会导致车辆发生折叠失稳,甚至导致车辆侧翻。为了保证半挂牵引车在整体的工况下保持稳定,我们需要找到不同场景下铰接角的临界值,确定车辆稳定对应铰接角稳定域。
C++ Primer Plus习题及答案(合集)
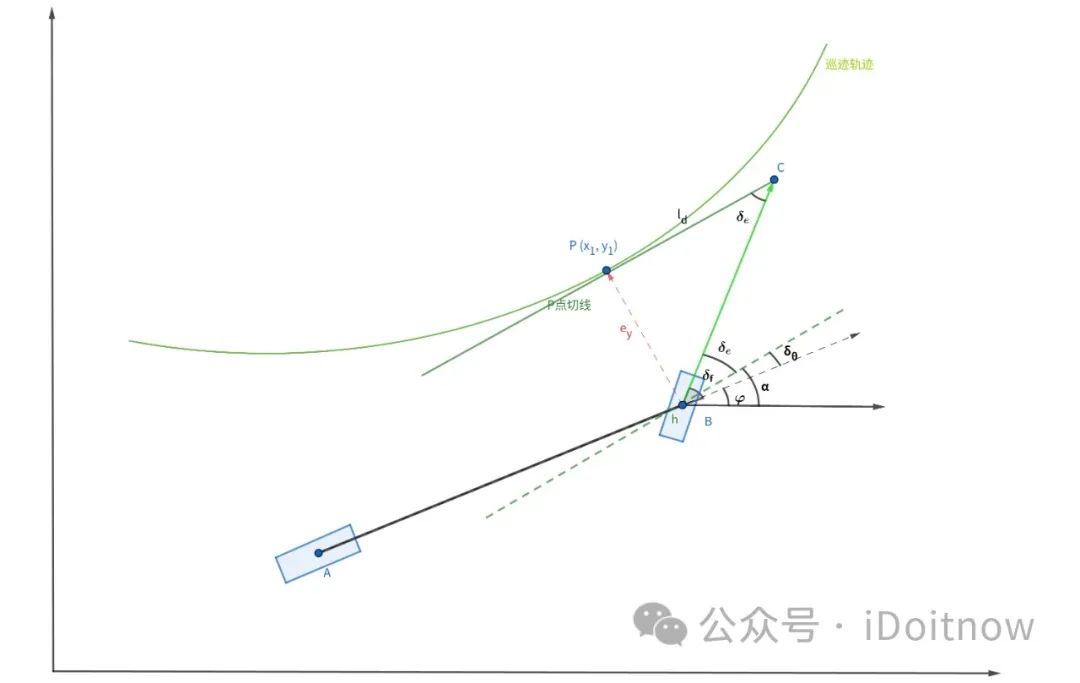
Stanley横向控制就是我们常说的也叫做**前轮反馈控制**(Front wheel feedback),是一种基于横向跟踪误差的非线性反馈控制算法,其核心思想是根据车辆位姿与给定路径的相对几何关系来控制车辆方向盘转角。具体来说,Stanley横向控制算法将车辆的横向跟踪误差和航向跟踪误差作为反馈信号,通过非线性比例函数计算出前轮转向角,以减小横向跟踪误差并提高车辆的横向跟踪性能。
C++ 深入理解const_cast转换运算符:仅当实际引用的对象/变量不是常量,才使用const_cast;当我们调用第三方库和一些API时,它们需要使用非const形式的数据,但我们只有const形式数据时候才能使用const_cast。仅在不得不的情况下使用const_cast。